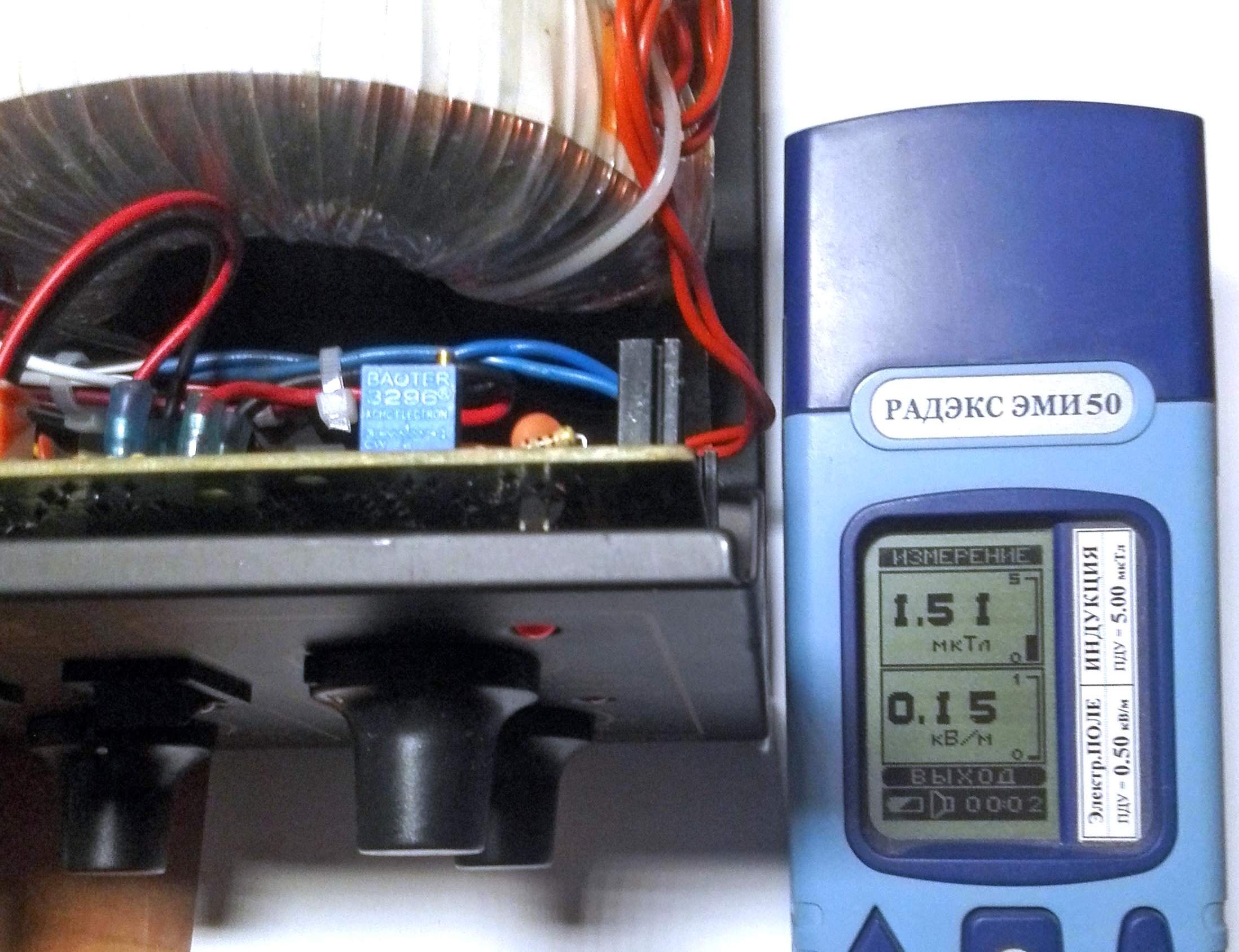
Паяльная станция Element (YIHUA) 852D+ переделка, доработка.
Вс июн 12, 2016 04:39:17

Тип фена: мембранный насос (Помпа), Воздушный поток: 24-28 л/мин, Сопротивление фена: 90 Ом
Паяльник: Нихром в керамике = 16 ом, Термопара = 1,3 ом
Требовалось: переход на "честную" керамику HAKKO No. A1321 с Терморезистором, калибровка, замена слабого транса, добавление отключения по неактивности.
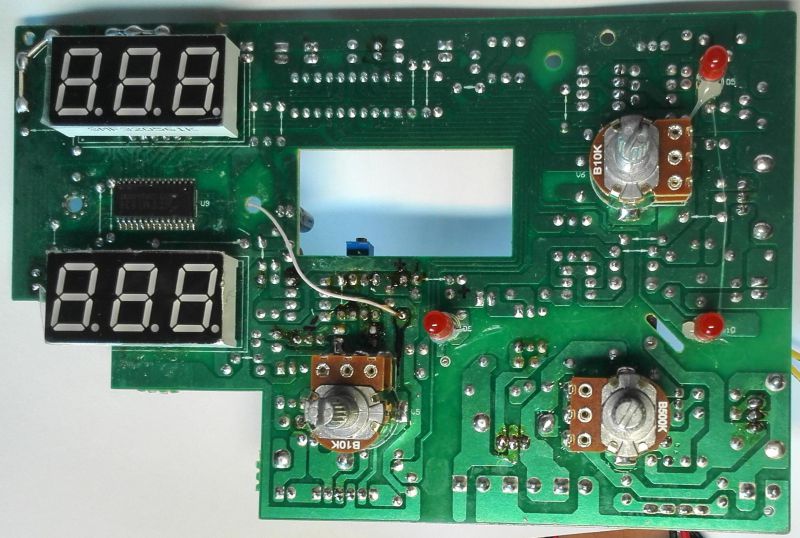
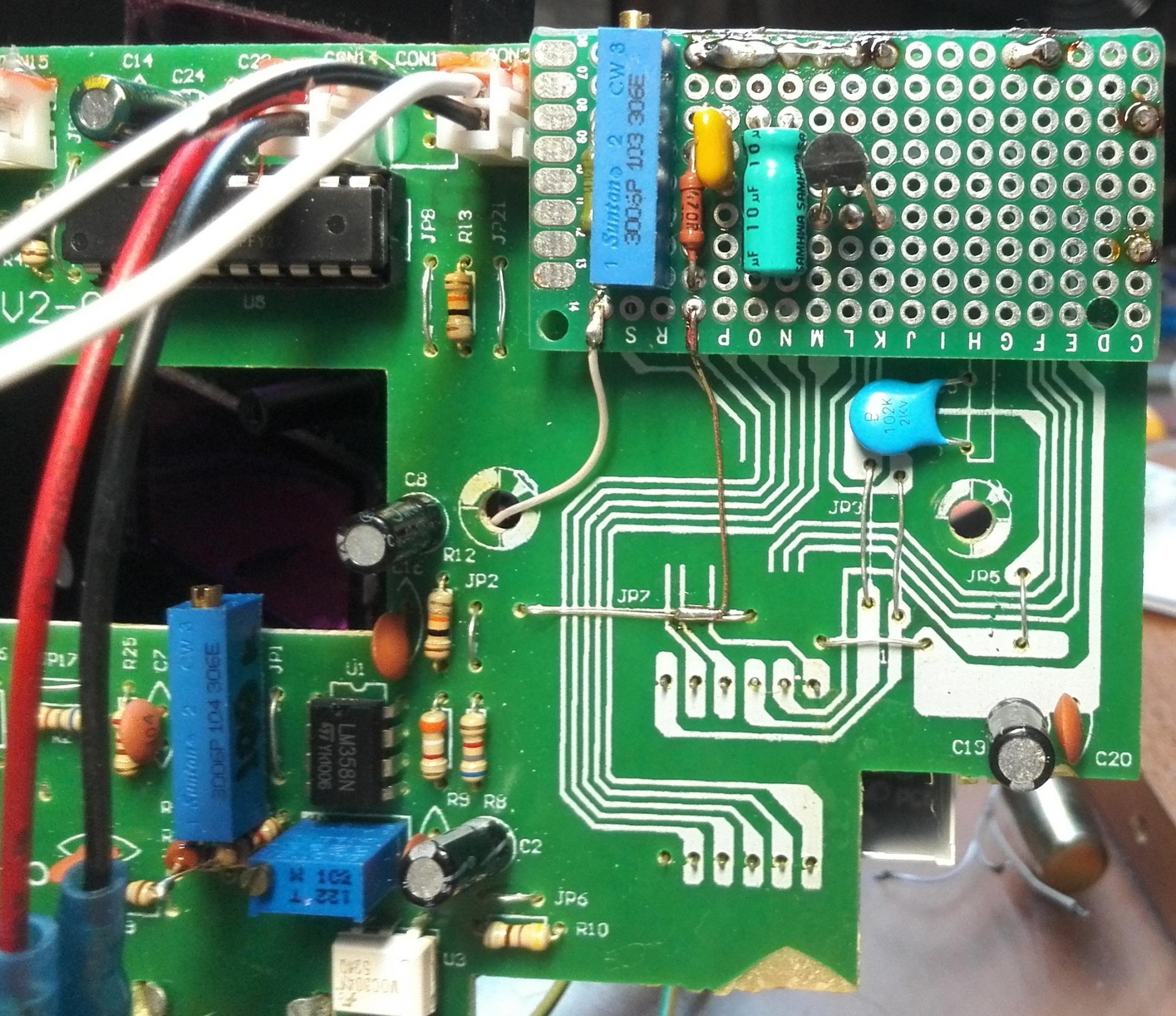
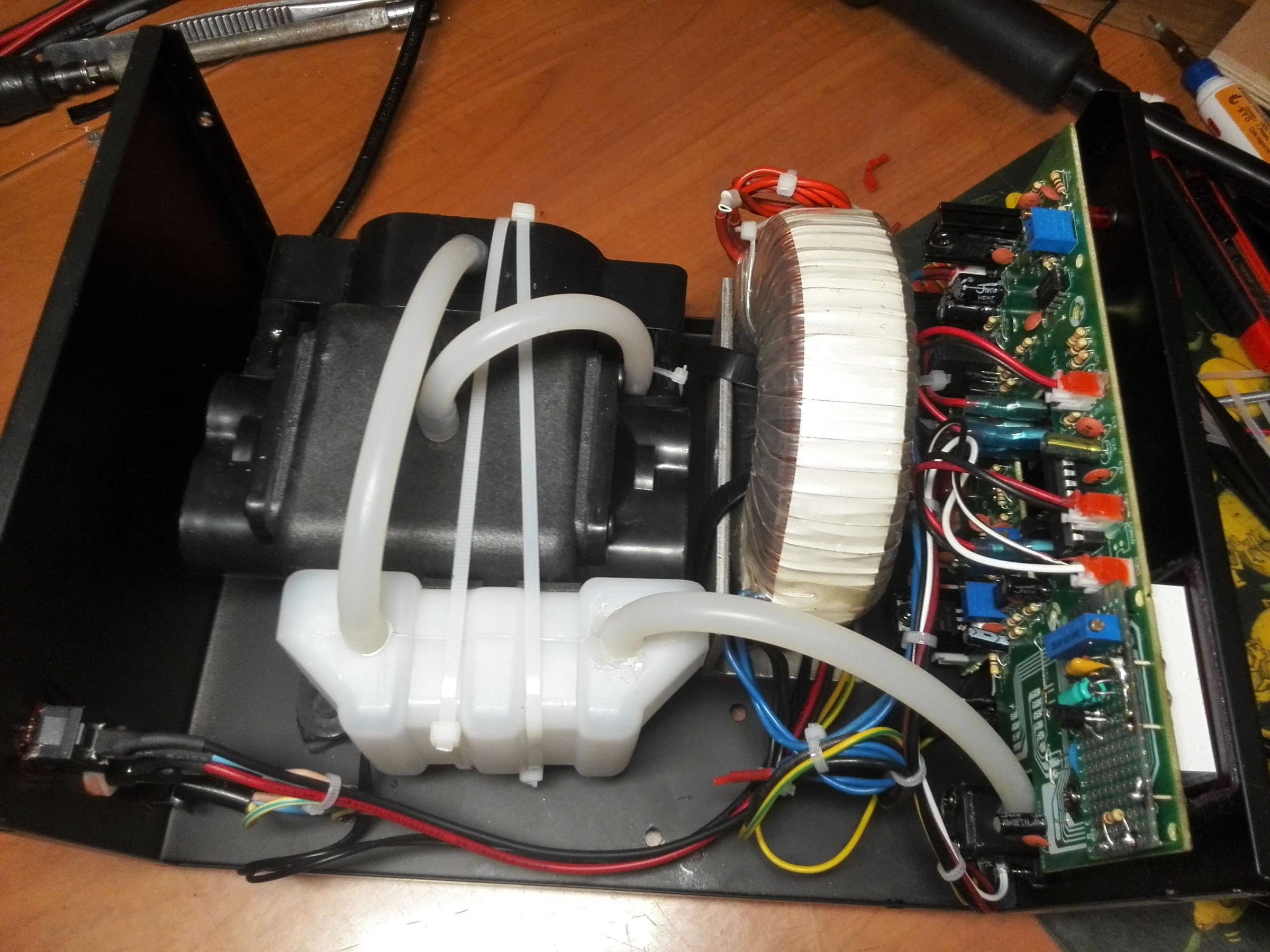
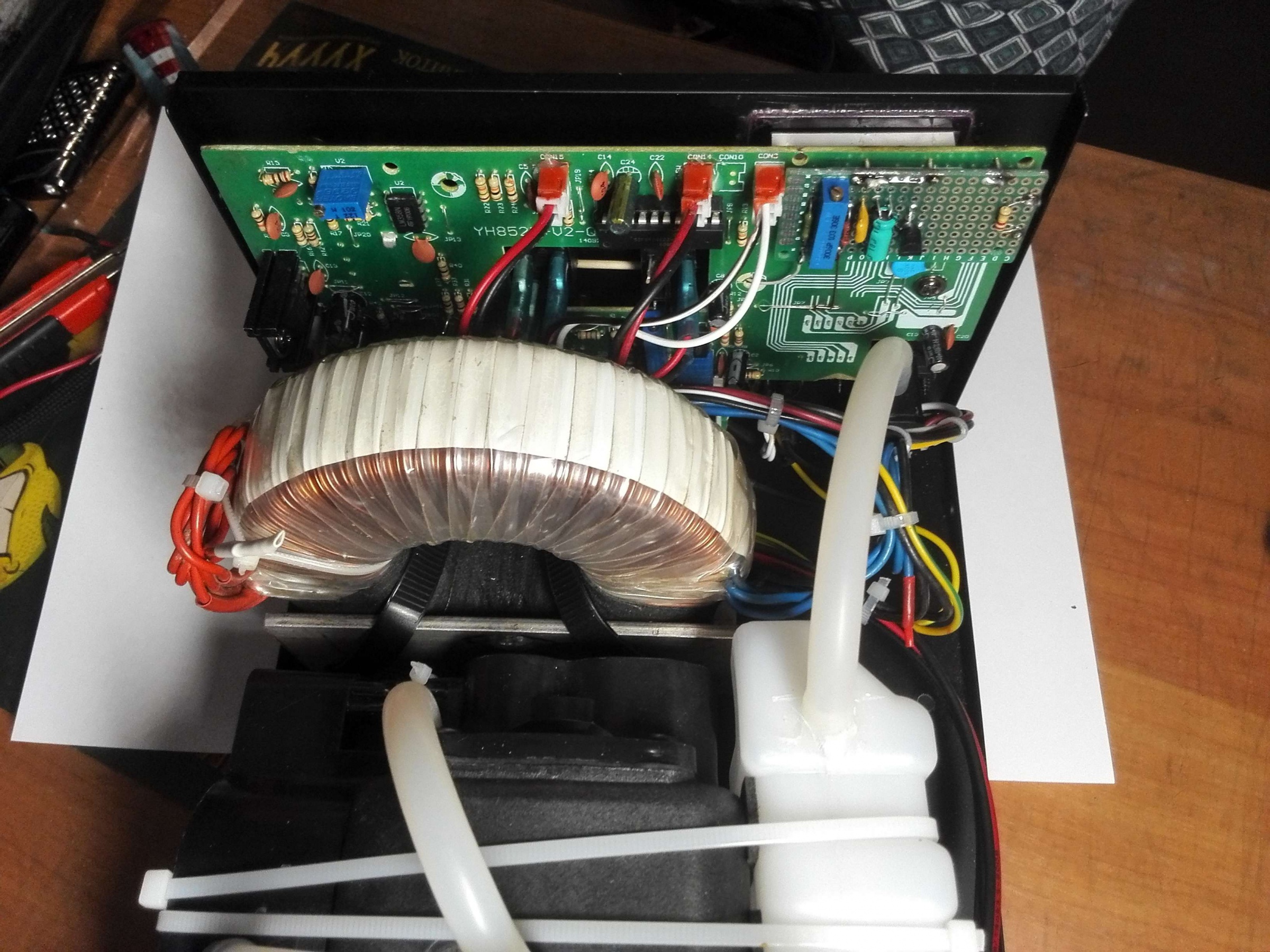
Потрошки
Спойлер

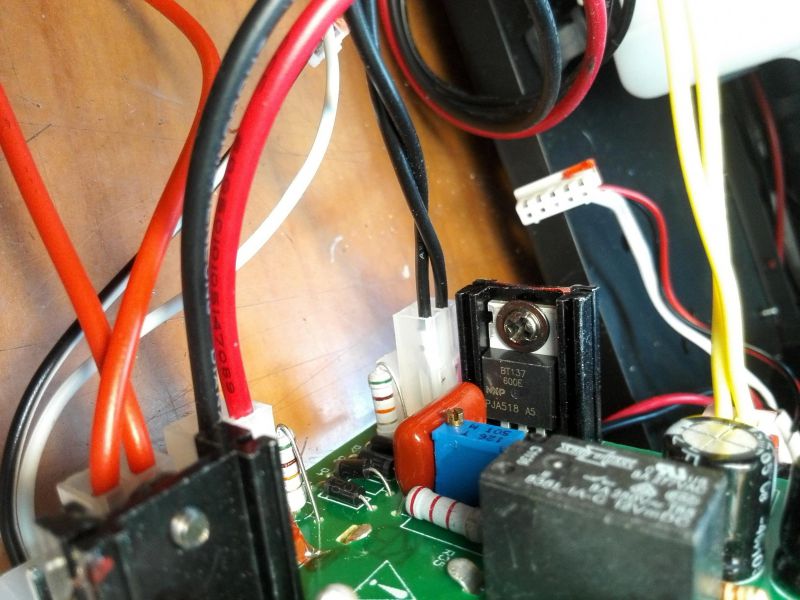

Спойлер
Нагреватель с терморезистором вместо старого, с Термопарой заказал с eBay - Нагеватели Hakko 1321 - пару штук. Простая замена - естественно НЕ ЗАРАБОТАЛА. Покурил интернет (этот форум) - оказалось, что нужно переделывать схему. Огромное спасибо Victor_P. за пинок в нужном направлении. 1-я схема - как было изначально, 2-я - схема доработки (изменений).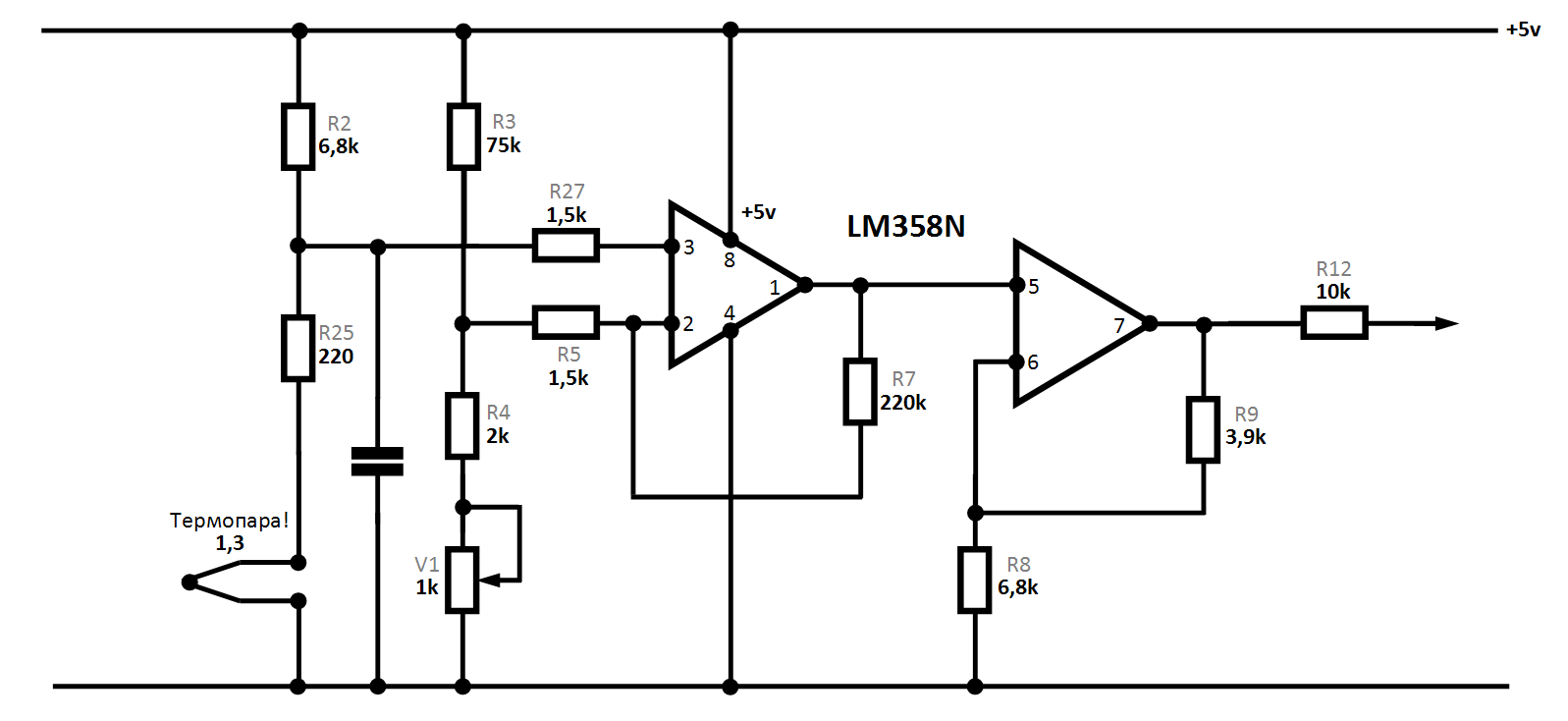

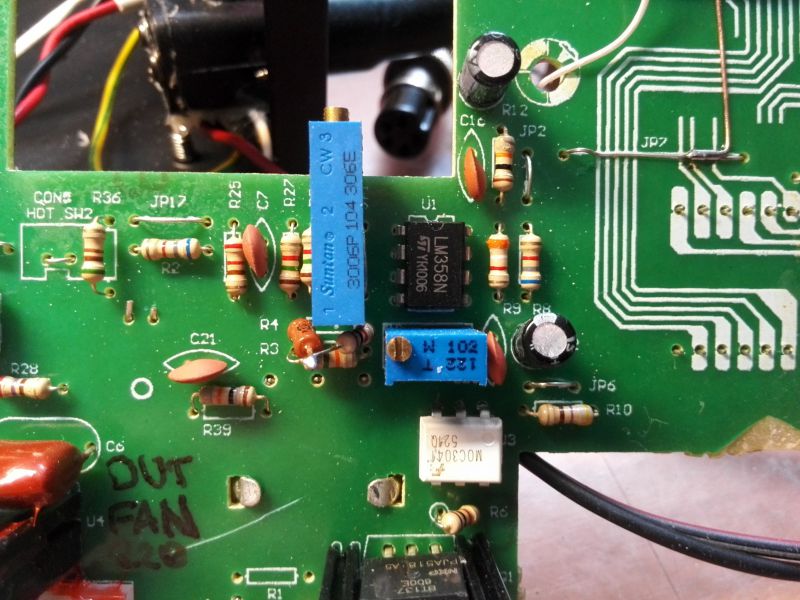
логика моих расчётов была следующей: измерил выставленные с магазина значения потенциометров и получилось вот что:
если R2 (6.8к) разделить на сумму R25 + ТермоПара (221,3) = 30,720 попугайчиков
если R3 (75к) разделить на сумму V1 + R4 (2.37 к) = 31,642 попугайчика
т.е. т.к. плечи операционника должны практически равны (31,642 / 30,720 = 1.03) - всё, что понадобилось сделать, это заменить R4 на немного больший номинал, вместо 2к поставил 2.2к, этого хватило для подстройки под новое сопротивление термодатчика, что обеспечило значение начальной (нижней, холодной) температуры нагревателя.
и пришлось заменить R7, на многооборотный потенциометр, который стал отвечать за верхнюю температуру нагревателя. При 480 градусах его значение оказалось в районе 76 к.
Ну и не знаю зачем, но собрал Компенсатор стабилизатор холодного спая термопары/терморезистора на основе регулируемого стабилитрона TL431, как написано тут. Потом оказалось, что им можно супер-точно выставить начальную комнатную температуру.
КАЛИБРОВКА: выставил все потециометры на середину, отключил нагреватель, на холодном терморезисторе добился комнатных 20 градусов крутил сначала R4, затем более точно - R32. Очень оказалось удобно - 1 полный оборот R32 = 10 градусам нагревателя.
Выставил 480 градусов, и вращая R7 (100к) получил 480 гр. на кончике жала. Выставил 200 градусов, дал остыть - проверил значение Profit. Пруфы.


Спойлер
Обязательна пропайка практически ВСЕХ разъёмов на плате. Не обжаты! Если потянуть за проводок - вытаскиваются из контактов.
Замена нагревателя. Сделал "колечки, чтобы было удобнее двигать вперед-назад, вправо-влево, и в другие стороны... )

Замена трансформатора. Заказал на eBay - тут. Продавец торгуется. Можно подвинуть его на 20%. Мне обошёлся в 1к руб. Приехал из немеции за 7 дней. Разница в работе станции после замены транса - очень сильно ощутима! Кроме того, фонить / шуметь / греться - ВООБЩЕ перестало...
Полная замена всех шлангов и проводов на очень мягкий силикон (260 градусов). Заказано с eBay. Еще едет.




Спойлер
Помогите, пожалуйста, реализовать вот такой девайс, сам разработать - не осилю, т.к. не хватает знаний, но собрать по предложенной схеме смогу всё, что угодно. Поиск готового решения не помог – не удалось найти ничего, что подошло бы. Цифровой индикатор с обратным отсчётом – не нужен, 5 светодиодиков есть куда разместить, а дырку под табло - нет.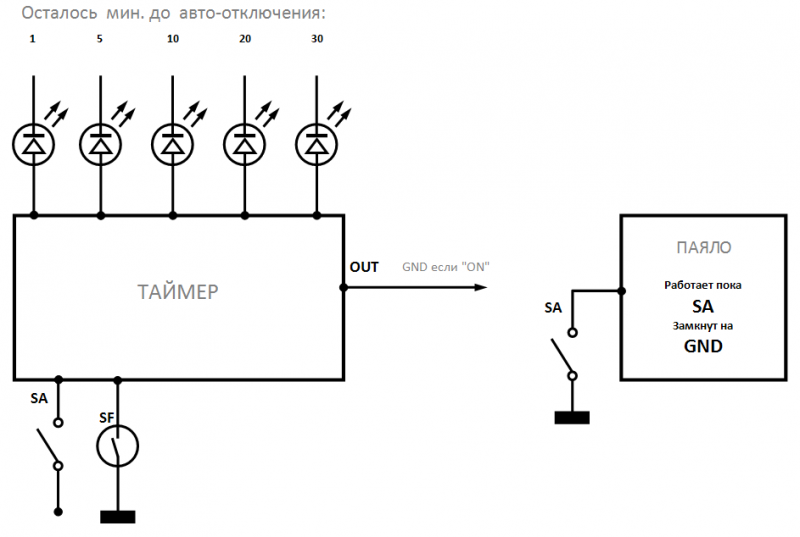
Логика работы таймера:
1. Включаем SA (замыкаем, НЕ КНОПКА), OUT сразу замыкается на GND и, затем:
2. Запускается ТАЙМЕР (начинает считать время), LED 1-5 не горят.
3. При размыкании SA -> GND на OUT пропадает сразу. Таймер перестаёт работать.
4. РАЗМЫКАНИЕ или ЗАМЫКАНИЕ геркона SF (или, вожможно, датчика вибрации / положения) - постоянный перезапуск таймера
5. если геркон SF не меняет своё состояние 30 мин (или ЗАМКНУТ, или РАЗОМКНУТ) то,
6. Загорелись все 5 светодиодов, и затем:
7. По мере убывания времени поочерёдно ГАСНУТ, каждые 10-15 мин. - LED-5,4,3,2,1 и, затем:
8. OUT размыкается от GND (паяло отключается)
9. Повторный старт – только если ВЫКЛЮЧИТЬ и повторно ВКЛЮЧИТЬ SA
PS: обязательное условие – один конец геркона SF на массе
Последний раз редактировалось AndroVet Пн июн 13, 2016 04:03:24, всего редактировалось 1 раз.
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Вс июн 12, 2016 20:34:00
Присоеденяюсь, так -же есть желание что бы после выхода станции на режим включался таймер
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Вс июн 12, 2016 22:26:45
Логика работы, уточнения: Выключатель SA он-же выключатель всей нагрузки?
Можно например сделать реле с само-подхватом, чтобы оно отваливалось по истечении времени и обесточивало входные цепи (от розетки),
тогда SA будет кнопкой
Нажал, время отсчитывается и по завершению отключается всё, повторное нажатие сброс к началу отсчёта..
В цепь SF от общего нужно включить резистор около 470 Ом (для МК обязательно)
Схема видится на следующих деталях:
МК AtTiny2313 и вот этого (светодиодная матрица на 10 шт)
Или SA это тумблер (напр.) и схема "таймера" в циклически ждущем режиме, пока не снимешь питание со схемы?
Активный уровень для силовой схемы паяльника низкий? (реле или симистор? или ещё чего?)
Я для дачика движения использовал вот такое:
Он на переменку 220В с включением перехода синусойды через ноль (для постоянки не годится).
Этой плате нужно 5В для управления, как и AtTiny2313 для питания.
И ещё: Время в минутах... какая точность ? (+/- 1-2 мин... например важно/нет)
Можно например сделать реле с само-подхватом, чтобы оно отваливалось по истечении времени и обесточивало входные цепи (от розетки),
тогда SA будет кнопкой
Нажал, время отсчитывается и по завершению отключается всё, повторное нажатие сброс к началу отсчёта..
В цепь SF от общего нужно включить резистор около 470 Ом (для МК обязательно)
Схема видится на следующих деталях:
МК AtTiny2313 и вот этого (светодиодная матрица на 10 шт)
Спойлер
Или SA это тумблер (напр.) и схема "таймера" в циклически ждущем режиме, пока не снимешь питание со схемы?
Активный уровень для силовой схемы паяльника низкий? (реле или симистор? или ещё чего?)
Я для дачика движения использовал вот такое:
Спойлер
Он на переменку 220В с включением перехода синусойды через ноль (для постоянки не годится).
Этой плате нужно 5В для управления, как и AtTiny2313 для питания.
И ещё: Время в минутах... какая точность ? (+/- 1-2 мин... например важно/нет)
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Пн июн 13, 2016 03:49:27
По порядку:
1. SA это не общий выключатель питания всей Паяльной Станции (далее - ПС). Это тумблер который только включает канал паяльника. Он уже имеется и висит на одной из ног контроллера и соединят эту ногу с массой -> паяльник включается. Идея в том, чтобы его просто переткнуть на таймер - ТРИЗ - использование имеющихся ресурсов.
2. отключать всю станцию от питания НЕЛЬЗЯ, т.к. вдруг работал фен и он еще не продулся после отключения. А в режиме ожидания, с хорошим (тихим, не греющимся) тороидальным трансом ПС может и месяц включенной (в режиме ожидания) простоять. Главное - чтобы не выгорали жала и нагреватель.
3. Светодиодная матрица это конечно здорово, но просверлить 5 маленьких дырочек под светодиодики - эстетичнее, да и с такой матрицей - уже тогда проще 2-х сегментный индикатор и обратный отсчет минут. А так не нужно точно - это уже перегиб.
4. Про паяльник... Не всё понял из вопросов, но суть в следующем: в проводе паяльника есть 1 (одна) свободная жила. Вот на неё то и есть желание повесить НЕЧТО, что и будет контролить активность паяльника. Самое очевидное - геркон, и даже если паяльник сунуть не в подставку, а положить мимо, или сунуть криво, и т.п., то схема всё равно отработает - состояние геркона меняться то не будет. НО, естествеено, что НАМНОГО предпочтительнее какой нибудь датчик вибрации или положения, или еще чего... я просто сходу не нашел оного. Однако провод в ручку паяльника ВСЕГО ОДИН.
5. про точность - конечно же это вообще не важно - главное, чтобы если ПС 45-65 мин. со включенным паяльником простояла, а суеты с паяльником нет -> канал паяльника ОТКЛЮЧИЛСЯ. При этом вполне может быть, что просто работаем с феном. Или ушли куда....
1. SA это не общий выключатель питания всей Паяльной Станции (далее - ПС). Это тумблер который только включает канал паяльника. Он уже имеется и висит на одной из ног контроллера и соединят эту ногу с массой -> паяльник включается. Идея в том, чтобы его просто переткнуть на таймер - ТРИЗ - использование имеющихся ресурсов.
2. отключать всю станцию от питания НЕЛЬЗЯ, т.к. вдруг работал фен и он еще не продулся после отключения. А в режиме ожидания, с хорошим (тихим, не греющимся) тороидальным трансом ПС может и месяц включенной (в режиме ожидания) простоять. Главное - чтобы не выгорали жала и нагреватель.
3. Светодиодная матрица это конечно здорово, но просверлить 5 маленьких дырочек под светодиодики - эстетичнее, да и с такой матрицей - уже тогда проще 2-х сегментный индикатор и обратный отсчет минут. А так не нужно точно - это уже перегиб.
4. Про паяльник... Не всё понял из вопросов, но суть в следующем: в проводе паяльника есть 1 (одна) свободная жила. Вот на неё то и есть желание повесить НЕЧТО, что и будет контролить активность паяльника. Самое очевидное - геркон, и даже если паяльник сунуть не в подставку, а положить мимо, или сунуть криво, и т.п., то схема всё равно отработает - состояние геркона меняться то не будет. НО, естествеено, что НАМНОГО предпочтительнее какой нибудь датчик вибрации или положения, или еще чего... я просто сходу не нашел оного. Однако провод в ручку паяльника ВСЕГО ОДИН.
5. про точность - конечно же это вообще не важно - главное, чтобы если ПС 45-65 мин. со включенным паяльником простояла, а суеты с паяльником нет -> канал паяльника ОТКЛЮЧИЛСЯ. При этом вполне может быть, что просто работаем с феном. Или ушли куда....
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Пн июн 13, 2016 18:27:28
Начинаю вникать помаленьку... (я криво излагаю мысли  )
)
Я теперь понял, что у Вас паяльная станция на каком-то МК*** (далее можно: МК-ПС или ПС-МК)
А я подумал, что нужен таймер для обычного (другого) паяльника
Есть ли на ножке МК-ПС от SA резистор (от +5В к этой ножке) ? Если нет, то замерьте ток на SA (миллиамперметр к выводам SA, SA при этом = выключен. При измерении ПС включится, мне эти измерения и нужны) - это чтобы мне понять, какой ток протекает во внутренностях PullUp у МК-ПС. И определить, можно-ли напрямую подавать логические уровни или нет...
Я теперь понял, что у Вас паяльная станция на каком-то МК*** (далее можно: МК-ПС или ПС-МК)
А я подумал, что нужен таймер для обычного (другого) паяльника
Есть ли на ножке МК-ПС от SA резистор (от +5В к этой ножке) ? Если нет, то замерьте ток на SA (миллиамперметр к выводам SA, SA при этом = выключен. При измерении ПС включится, мне эти измерения и нужны) - это чтобы мне понять, какой ток протекает во внутренностях PullUp у МК-ПС. И определить, можно-ли напрямую подавать логические уровни или нет...
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Вт июн 14, 2016 03:58:03
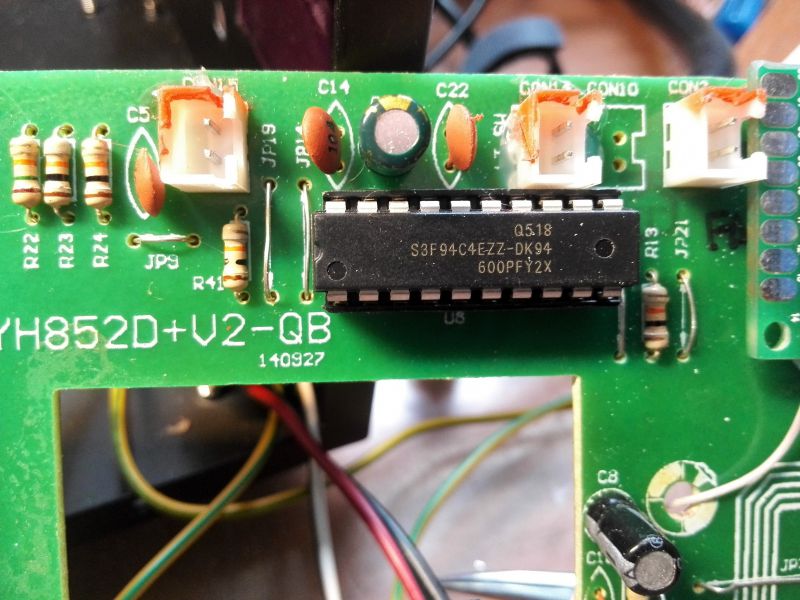
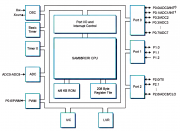
Канал паяльника выполнен на Samsung s3f94c4ezz-dk94, SA висит сразу на 12-й ноге этого микроконтроллера. Никаких других навесных НЕТ. При включении - тупо замыкает 12-ю ногу на массу.
Ток (через SA на массу) = 10мА. В разомкнутом состоянии на SA +5v.
PS: Большое спасибо, что откликнулись! )


Ток (через SA на массу) = 10мА. В разомкнутом состоянии на SA +5v.
PS: Большое спасибо, что откликнулись! )
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Вт июн 14, 2016 11:32:14
У Вас есть чем программировать МК AtTiny2313 ?
SA с фиксацией?
(SA ведь можно и на +5 посадить, если понадобиться? и заменить на кнопку без фиксации при условии, что ПС останется полностью в рабочем состоянии) - мысли вслух..
SA с фиксацией?
(SA ведь можно и на +5 посадить, если понадобиться? и заменить на кнопку без фиксации при условии, что ПС останется полностью в рабочем состоянии) - мысли вслух..
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Вт июн 14, 2016 11:42:27
C кнопкой - полностью с Вами согласен, всё равно на чём она будет сидеть. Но только важное уточнение - не кнопка, а именно ВЫКЛЮЧАТЕЛЬ. При его ВКЛЮЧЕНИИ - на выходе таймера сразу GND и таймер пошел, при ВЫКЛЮЧЕНИИ - нет на выходе GND и таймер тоже сразу отключен.
Увы - програматора нет, но если поделитесь реальной проверенной и рабочей схемой именно под нужный МК, сделаю и его.
Увы - програматора нет, но если поделитесь реальной проверенной и рабочей схемой именно под нужный МК, сделаю и его.
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Вт июн 14, 2016 15:03:31
Вы писали, что с eBay едут провода....
Вот ссылки для ознакомления на почти готовое устройство
МК AtMega328 на плате, уже готовое устройство, осталось код написать (смогут 99,9% жителей нашего кото-форума)... и даже должен я суметь
http://www.ebay.com/itm/New-Pro-Mini-atmega328-Board-5V-16M-Arduino-Compatible-Nano-NEW-M43-/301723336845?hash=item46401cc08d
P.S. Меня интересовала в запас для моих поделок AtMega-328, поэтому я купил себе такую штуку. Не знаю есть ли там загрузчик для модной сейчас "платформы" ARDUINO (xxxxDUINO....),но сама плата и на ней МК по приятной цене. Если на плате чистый (не прошитый) МК, то было-бы супер, тогда программатор из нижней ссылки её прошьёт и
Сам МК может управлять почти любой ПС с любыми дисплеями/светодиодами (32 Кб памяти внутри для кода и куча ножек)
Вот и программатор (образец)
http://www.ebay.com/itm/New-USBASP-USBISP-AVR-Programmer-USB-ATMEGA8-ATMEGA128-/291768057759?hash=item43eebb3f9f
Если будете заказывать, то рекомендуют пару программаторов брать (бывают косячки) может даже у разных продавцов***
Стоит присмотреться я думаю к этим товарам, жизнь электронщика без инструментов для разработки - полная (о)
Вот ещё форум/сайт для ознакомления (хотя-бы виртуально в мыслях попробуйте собрать... )
)
http://www.getchip.net/posts/056-usb-programmator-legko-usbtiny/
Вот ещё подберите варианты для себя... пора учиться новому, я начал помаленьку и потихоньку
http://www.getchip.net/posts/vybiraem-programmator-dlya-avr-mikrokontrollerov/
http://www.getchip.net/posts/104-proshivka-lyubogo-hex-fajjla-v-arduino-pri-pomoshhi-shtatnogo-zagruzchika-bootloader/
Там на картинке плата из поста выше
И вот главное это (для примера с чем иметь выгодно/придётся иметь дело)
http://www.getchip.net/posts/prostaya-otladochnaya-plata-dlya-ustrojjstv-avr-atmega4888168-s-chasovym-kvarcem/
Извините за "многабукв" но бегло просмотрите
А мне хочется ознакомиться с проводами (ссылочку...)
Вот я можно сказать начинал с этого и это самый подходящий для Вас вариант получается
(Отладочную плату делаем сами. Часть 2 (Вариант с ATtiny2313).
http://myrobot.ru/wiki/index.php?n=Experiences.SelfmadeDemoBoard1
http://myrobot.ru/wiki/index.php?n=Experiences.SelfmadeDemoBoard2
Ну и в обучалке котофорума очень много полезного
http://radiokot.ru/start/mcu_fpga/avr/05/
А так... готовое устройство это МК типа AtTiny2313 или AtMega168...(из популярно-доступных) и к этому МК допаять светодиоды, короче всё как в вашей схеме...
Вот ссылки для ознакомления на почти готовое устройство
Спойлер
Посмотрите на цены МК AtMega328 на плате, уже готовое устройство, осталось код написать (смогут 99,9% жителей нашего кото-форума)... и даже должен я суметь
http://www.ebay.com/itm/New-Pro-Mini-atmega328-Board-5V-16M-Arduino-Compatible-Nano-NEW-M43-/301723336845?hash=item46401cc08d
P.S. Меня интересовала в запас для моих поделок AtMega-328, поэтому я купил себе такую штуку. Не знаю есть ли там загрузчик для модной сейчас "платформы" ARDUINO (xxxxDUINO....),но сама плата и на ней МК по приятной цене. Если на плате чистый (не прошитый) МК, то было-бы супер, тогда программатор из нижней ссылки её прошьёт и
Сам МК может управлять почти любой ПС с любыми дисплеями/светодиодами (32 Кб памяти внутри для кода и куча ножек)
Вот и программатор (образец)
http://www.ebay.com/itm/New-USBASP-USBISP-AVR-Programmer-USB-ATMEGA8-ATMEGA128-/291768057759?hash=item43eebb3f9f
Если будете заказывать, то рекомендуют пару программаторов брать (бывают косячки) может даже у разных продавцов***
Стоит присмотреться я думаю к этим товарам, жизнь электронщика без инструментов для разработки - полная (о)
Вот ещё форум/сайт для ознакомления (хотя-бы виртуально в мыслях попробуйте собрать...
)http://www.getchip.net/posts/056-usb-programmator-legko-usbtiny/
Вот ещё подберите варианты для себя... пора учиться новому, я начал помаленьку и потихоньку
http://www.getchip.net/posts/vybiraem-programmator-dlya-avr-mikrokontrollerov/
http://www.getchip.net/posts/104-proshivka-lyubogo-hex-fajjla-v-arduino-pri-pomoshhi-shtatnogo-zagruzchika-bootloader/
Там на картинке плата из поста выше
И вот главное это (для примера с чем иметь выгодно/придётся иметь дело)
http://www.getchip.net/posts/prostaya-otladochnaya-plata-dlya-ustrojjstv-avr-atmega4888168-s-chasovym-kvarcem/
Извините за "многабукв" но бегло просмотрите
А мне хочется ознакомиться с проводами (ссылочку...)
Вот я можно сказать начинал с этого и это самый подходящий для Вас вариант получается
(Отладочную плату делаем сами. Часть 2 (Вариант с ATtiny2313).
http://myrobot.ru/wiki/index.php?n=Experiences.SelfmadeDemoBoard1
http://myrobot.ru/wiki/index.php?n=Experiences.SelfmadeDemoBoard2
Ну и в обучалке котофорума очень много полезного
http://radiokot.ru/start/mcu_fpga/avr/05/
А так... готовое устройство это МК типа AtTiny2313 или AtMega168...(из популярно-доступных) и к этому МК допаять светодиоды, короче всё как в вашей схеме...
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Ср июн 15, 2016 01:04:13
О проводах... провода решил сделать "с нуля". Списался с продаваном, он оказался очень контактным и адекватным. По моей просьбе "попихал" свои провода разных диаметров (которые я ему сказал) в свои-же разные трубки. Для внешней оболочки провода ПАЯЛЬНИКА я заказал 2 варианта: супермягкую, толстостенную силиконовую трубку (внеш.диам.6мм, а стандартный родной провод паяльника внеш.диам.5.5мм), и мелко плетёную сетку. Определюсь, что именно выбрать, после того как подержу в руках оба варианта. Под спойлером заказ (для 2-х паяльников, по этому везде ДВОЙНОЙ комплект, кроме фена, и ценник там соответственно тоже - х2):
4x6 Food Grade Silicone Tube Hose Pipe ID 4mm OD 6mm High Quality muticolors (Black / 5м / 400 руб.)
4mm Braided PET Expandable Cable Wire Sheathing Color Selectable (Black / 5м / 160 руб.)
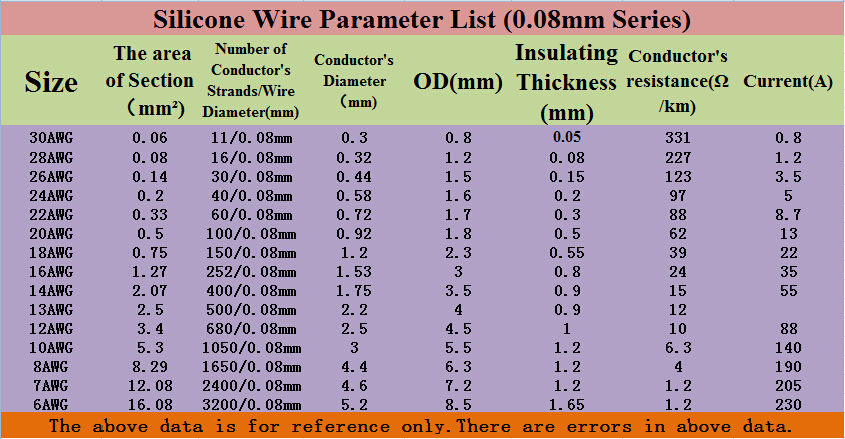
20AWG Flexible Silicone Wire Cable ULVW-1 Soft HighTemperature Tinned Copper (5м (1,25м x 2 x 2) 330 руб.)
26AWG Flexible Silicone Wire Cable ULVW-1 Soft HighTemperature Tinned Copper (10м (1,25м x 4 x 2) 466руб.)
ФЕН: Толстостенная силиконовая трубка и жилки (сами провода) для протяжки внутри трубки. Более толстый (22AWG 8.7Ампера) на нагреватель 2 шт.в трубку, тонкие (26AWG 3.5Ампера) - сигнальные 4 шт.):
12x16 Food Grade Silicone Tube Hose Pipe ID 12mm OD 16mm New High Quality (Black / 1м / 460 руб.)
22AWG Flexible Silicone Wire Cable ULVW-1 Soft HighTemperature Tinned Copper (5м / 281руб.)
26AWG Flexible Silicone Wire Cable ULVW-1 Soft HighTemperature Tinned Copper (5м / 242 руб.)
КОМПРЕССОР. Все трубки нужно удлинять. Киты сэкономили, нарезали коротко - впритык и на поворотах трубки приплюснуты, нужны повороты большего радиуса. Взял 1м "родной" компрессорной силиконовой трубки:
Peristaltic Pump Silicone Hose Food Grade Clear Tube Pipe Brand New High Quality (1м х 4.8мм x 8мм / 260 руб.)Вопросы:
1. так на чем-же всё таки делать? На ATtiny2313 или на AtMega? (мне больше понравилась AtMega...)
2. не понял - AtMega8; AtMega328 - по Вашей ссылке; AtMega168 - в посту, это по сути всё одно и тоже?
3. спасибо за ссылки на оч.хорошие статьи по програмированию и прошивке, 99.9%, что разберусь, напишу и прошью, НО! Статья по програмированию для ATtiny2313 подходит для AtMega328 (по ссылке, которая ведёт на eBay)?
4. Цитата: "Если на плате чистый (не прошитый) МК, то было-бы супер", т.е. - заказать, подождать, а он не чистый... пИчалько...
Спойлер
ПАЯЛЬНИК: Первые 2 позиции - внешняя оболочка, 2 следующие - жилки (сами провода) для протяжки внутри трубки (или оплётки). Более толстый (20AWG 13Ампер) на нагреватель 2 шт.в трубку, тонкие (26AWG 3.5Ампера) сигнальные по 4 шт.):4x6 Food Grade Silicone Tube Hose Pipe ID 4mm OD 6mm High Quality muticolors (Black / 5м / 400 руб.)
4mm Braided PET Expandable Cable Wire Sheathing Color Selectable (Black / 5м / 160 руб.)
20AWG Flexible Silicone Wire Cable ULVW-1 Soft HighTemperature Tinned Copper (5м (1,25м x 2 x 2) 330 руб.)
26AWG Flexible Silicone Wire Cable ULVW-1 Soft HighTemperature Tinned Copper (10м (1,25м x 4 x 2) 466руб.)
ФЕН: Толстостенная силиконовая трубка и жилки (сами провода) для протяжки внутри трубки. Более толстый (22AWG 8.7Ампера) на нагреватель 2 шт.в трубку, тонкие (26AWG 3.5Ампера) - сигнальные 4 шт.):
12x16 Food Grade Silicone Tube Hose Pipe ID 12mm OD 16mm New High Quality (Black / 1м / 460 руб.)
22AWG Flexible Silicone Wire Cable ULVW-1 Soft HighTemperature Tinned Copper (5м / 281руб.)
26AWG Flexible Silicone Wire Cable ULVW-1 Soft HighTemperature Tinned Copper (5м / 242 руб.)
КОМПРЕССОР. Все трубки нужно удлинять. Киты сэкономили, нарезали коротко - впритык и на поворотах трубки приплюснуты, нужны повороты большего радиуса. Взял 1м "родной" компрессорной силиконовой трубки:
Peristaltic Pump Silicone Hose Food Grade Clear Tube Pipe Brand New High Quality (1м х 4.8мм x 8мм / 260 руб.)
1. так на чем-же всё таки делать? На ATtiny2313 или на AtMega? (мне больше понравилась AtMega...)
2. не понял - AtMega8; AtMega328 - по Вашей ссылке; AtMega168 - в посту, это по сути всё одно и тоже?
3. спасибо за ссылки на оч.хорошие статьи по програмированию и прошивке, 99.9%, что разберусь, напишу и прошью, НО! Статья по програмированию для ATtiny2313 подходит для AtMega328 (по ссылке, которая ведёт на eBay)?
4. Цитата: "Если на плате чистый (не прошитый) МК, то было-бы супер", т.е. - заказать, подождать, а он не чистый... пИчалько...
Последний раз редактировалось AndroVet Ср июн 15, 2016 08:36:44, всего редактировалось 2 раз(а).
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Ср июн 15, 2016 02:08:33
Очень хорошее описание проводков, я такой темой не занимался, надо взять на вооружение.
На чём душе угодно (в AtTiny2313 нет АЦП, это если вдруг аналоговый датчик вибрации, я не изучал этот вопрос, вдруг такие есть в природе) Я стараюсь мыслить на будущее (вариации/дополнения)
По сути да стоимость/доступность разная в разных уголках необъятной. Зависит какой программой их программировать ("шить/прошивать"), в перечне может отсутствовать какой нибудь МК (это нужно вентилировать по даташиту/форумам). В основном это код объёма внутренней памяти для программ 48=4 кБ, 88=8 кБ, 168=16 кБ, 328=32 КилоБайт памяти, вот
Статья - ДА, код/прошивка НЕТ (очень почти нет)

Вот spi интерфейс для прошивания есть в широком наборе этих МК

Главные ножки/выводы для программирования MOSI, MISO, SCK, SS, (RESET не залоченный) и +5В
Программа от 2313 к 168 без переделки не подойдёт (количество и название выводов, задействованная периферия внутри МК может отличаться, но исходник если есть, то можно поправить если разобраться в коде/перекомпилировать (зачастую это невозможно))
Берите любую, там разберёмся ( любая это мега168 , как я понял)
Я читал статью на котофоруме, а делал из робофорума плату (надо было с чего-то начинать в физическом смысле)
Так и остались макетные платы, как постоянные устройства, если нужно было делал ещё макетку
Я думаю ничего зазорного нет, чтоб спрашивать друг у друга, задавая свои вопросы.
Далее лирика---------------------------------------------------------------------------------------------------
P.S. Если Вы будете начинать с МК фирмы ATMEL (семейства 48/88/168/328/2313 и т.д.), то нужно выучить очерёдность/последовательность действий. Например нужно при подключении программатора сначала считать все области памяти (а это Lock BIT's, EEPROM, CODE, FUSE!) программой для прошивания (особенно важно FUSE BIT) если не разобраться и нет параллельного программатора, то МК можно запороть (залочить) и он больше не будет программироваться обычным последовательным программатором.
(Для восстановления и программирования нужен примерно такой программатор, но он способен на любые манипуляции с ПЗУ, МК и прочего.
Вам в помощь нужно эту ссылку добавить в избранное http://www.engbedded.com/fusecalc/ здесь выбираться тип МК и вот ээти Фьюзы (FUSE) и как их там устанавливать/изменять и как должны быть по молчанию, что важно, когда Вы прочитайте (считайте из МК с магазина) их программатором сможете сравнить с этим сайтом для "ясной-ясности" чего можно менять а чего не стоит.
Вобщем лучше спросить по началу перед прошиванием в натуре, и приобрести МК по возможности в запас (зависит от желаний ARDUINO'вский вариант или чистые). В среде программирования ARDUINO Си подобный язык и я не могу на нём кодить (писать код)
Изначально, как правило (с магазина) МК настроены на внутренний тактовый генератор и эта частота ещё делится на 8 вот, но уже можно прошивать Вашу программу и она худо-бедно (а тот и отлично) будет работать.
Т.Е. прошивать для светодиодного таймера можно не касаясь "FUSE/LOCK bit" , что для вас будет отличным вступлением в мир МК, но считывать перед программированием желательно FUSE , потому, что в программе для шитья этих МК может стоять опция "шить всё" (все области).
Это предупрежение а не отталкивание от занятия творчеством, все наступали на эти грабли и продолжают из-за невнимательности и я.
....Просто купи в запас одну,две,три....
Я ещё очень хреново обьясняю, прошу не беспокоиться сильно
Вот ещё обучалки для ARDUINO (если разберётесь, то за 10 минут воплотите все ваши хотелки, вот) https://www.youtube.com/watch?v=bO_jN0Lpz3Q
Здесь я лично не смогу помочь ("слегка туповат" )
AndroVet писал(а):Вопросы:
1. так на чем-же всё таки делать? На ATtiny2313 или на AtMega? (мне больше понравилась AtMega...)
На чём душе угодно (в AtTiny2313 нет АЦП, это если вдруг аналоговый датчик вибрации, я не изучал этот вопрос, вдруг такие есть в природе) Я стараюсь мыслить на будущее (вариации/дополнения)
2. не понял - AtMega8; AtMega328 - по Вашей ссылке; AtMega168 - в посту, это по сути всё одно и тоже?
По сути да стоимость/доступность разная в разных уголках необъятной. Зависит какой программой их программировать ("шить/прошивать"), в перечне может отсутствовать какой нибудь МК (это нужно вентилировать по даташиту/форумам). В основном это код объёма внутренней памяти для программ 48=4 кБ, 88=8 кБ, 168=16 кБ, 328=32 КилоБайт памяти, вот
3. спасибо за ссылки на оч.хорошие статьи по програмированию и прошивке, 99.9%, что разберусь, напишу и прошью, НО! Статья по програмированию для ATtiny2313 подходит для AtMega328 (по ссылке, которая ведёт на eBay)?
Статья - ДА, код/прошивка НЕТ (очень почти нет)
Вот spi интерфейс для прошивания есть в широком наборе этих МК
Спойлер
образец для обозренияГлавные ножки/выводы для программирования MOSI, MISO, SCK, SS, (RESET не залоченный) и +5В
Программа от 2313 к 168 без переделки не подойдёт (количество и название выводов, задействованная периферия внутри МК может отличаться, но исходник если есть, то можно поправить если разобраться в коде/перекомпилировать (зачастую это невозможно))
Берите любую, там разберёмся (
Я читал статью на котофоруме, а делал из робофорума плату (надо было с чего-то начинать в физическом смысле)
Так и остались макетные платы, как постоянные устройства, если нужно было делал ещё макетку
Я думаю ничего зазорного нет, чтоб спрашивать друг у друга, задавая свои вопросы.
Далее лирика---------------------------------------------------------------------------------------------------
P.S. Если Вы будете начинать с МК фирмы ATMEL (семейства 48/88/168/328/2313 и т.д.), то нужно выучить очерёдность/последовательность действий. Например нужно при подключении программатора сначала считать все области памяти (а это Lock BIT's, EEPROM, CODE, FUSE!) программой для прошивания (особенно важно FUSE BIT) если не разобраться и нет параллельного программатора, то МК можно запороть (залочить) и он больше не будет программироваться обычным последовательным программатором.
(Для восстановления и программирования нужен примерно такой программатор
Спойлер
http://www.ebay.com/itm/TL866CS-20adapters-TL866-PLCC-SOP28-AVR-PIC-Bios-51-MCU-Flash-EPROM-Programmer-/322141995504?hash=item4b0128c1f0:g:bLQAAOSwzJ5XV95f это как образец, ща дорого стало после курса$Вам в помощь нужно эту ссылку добавить в избранное http://www.engbedded.com/fusecalc/ здесь выбираться тип МК и вот ээти Фьюзы (FUSE) и как их там устанавливать/изменять и как должны быть по молчанию, что важно, когда Вы прочитайте (считайте из МК с магазина) их программатором сможете сравнить с этим сайтом для "ясной-ясности" чего можно менять а чего не стоит.
Вобщем лучше спросить по началу перед прошиванием в натуре, и приобрести МК по возможности в запас (зависит от желаний ARDUINO'вский вариант или чистые). В среде программирования ARDUINO Си подобный язык и я не могу на нём кодить (писать код)
Изначально, как правило (с магазина) МК настроены на внутренний тактовый генератор и эта частота ещё делится на 8 вот, но уже можно прошивать Вашу программу и она худо-бедно (а тот и отлично) будет работать.
Т.Е. прошивать для светодиодного таймера можно не касаясь "FUSE/LOCK bit" , что для вас будет отличным вступлением в мир МК, но считывать перед программированием желательно FUSE , потому, что в программе для шитья этих МК может стоять опция "шить всё" (все области).
Это предупрежение а не отталкивание от занятия творчеством, все наступали на эти грабли и продолжают из-за невнимательности и я.
....Просто купи в запас одну,две,три....
Я ещё очень хреново обьясняю, прошу не беспокоиться сильно
Вот ещё обучалки для ARDUINO (если разберётесь, то за 10 минут воплотите все ваши хотелки, вот) https://www.youtube.com/watch?v=bO_jN0Lpz3Q
Здесь я лично не смогу помочь ("слегка туповат"
)
Последний раз редактировалось CATяра Ср июн 15, 2016 03:18:24, всего редактировалось 3 раз(а).
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Ср июн 15, 2016 02:48:36
И ещё вопрос.
Как должен вести себя таймер при исчезновении напряжения в сети 220 В на 5 и более секунд (для примера, перебой в сети и т.д.)
Отключить ПС даже при включенном SA и повторно включиться после откл/вкл SA?
Как должен вести себя таймер при исчезновении напряжения в сети 220 В на 5 и более секунд (для примера, перебой в сети и т.д.)
Отключить ПС даже при включенном SA и повторно включиться после откл/вкл SA?
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Ср июн 15, 2016 08:03:07
Думаю, что это не принципиально. Хотя по логике - последнее более правильно. Если питание пропадало - не нужно автоматом вкючаться.
Закупаюсь на eBay...
http://www.ebay.com/itm/291549639192
http://www.ebay.com/itm/291768057759
http://www.ebay.com/itm/301723336845
http://www.ebay.com/itm/301723614864
Датчики "на попробовать", может окажутся поинтереснее чем геркон.
http://www.ebay.com/itm/291549896006
http://www.ebay.com/itm/291768121967
http://www.ebay.com/itm/351494130152
Пока торгуюсь с продавцом. Кроме этого там ещё в заказе комплектуха, 20% скидки выбиваю на всё...
Закупаюсь на eBay...
Спойлер
Вобщем решил заказать всё по списку (не в одном екземпляре естественно):http://www.ebay.com/itm/291549639192
http://www.ebay.com/itm/291768057759
http://www.ebay.com/itm/301723336845
http://www.ebay.com/itm/301723614864
Датчики "на попробовать", может окажутся поинтереснее чем геркон.
http://www.ebay.com/itm/291549896006
http://www.ebay.com/itm/291768121967
http://www.ebay.com/itm/351494130152
Пока торгуюсь с продавцом. Кроме этого там ещё в заказе комплектуха, 20% скидки выбиваю на всё...
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Чт июн 16, 2016 10:17:51
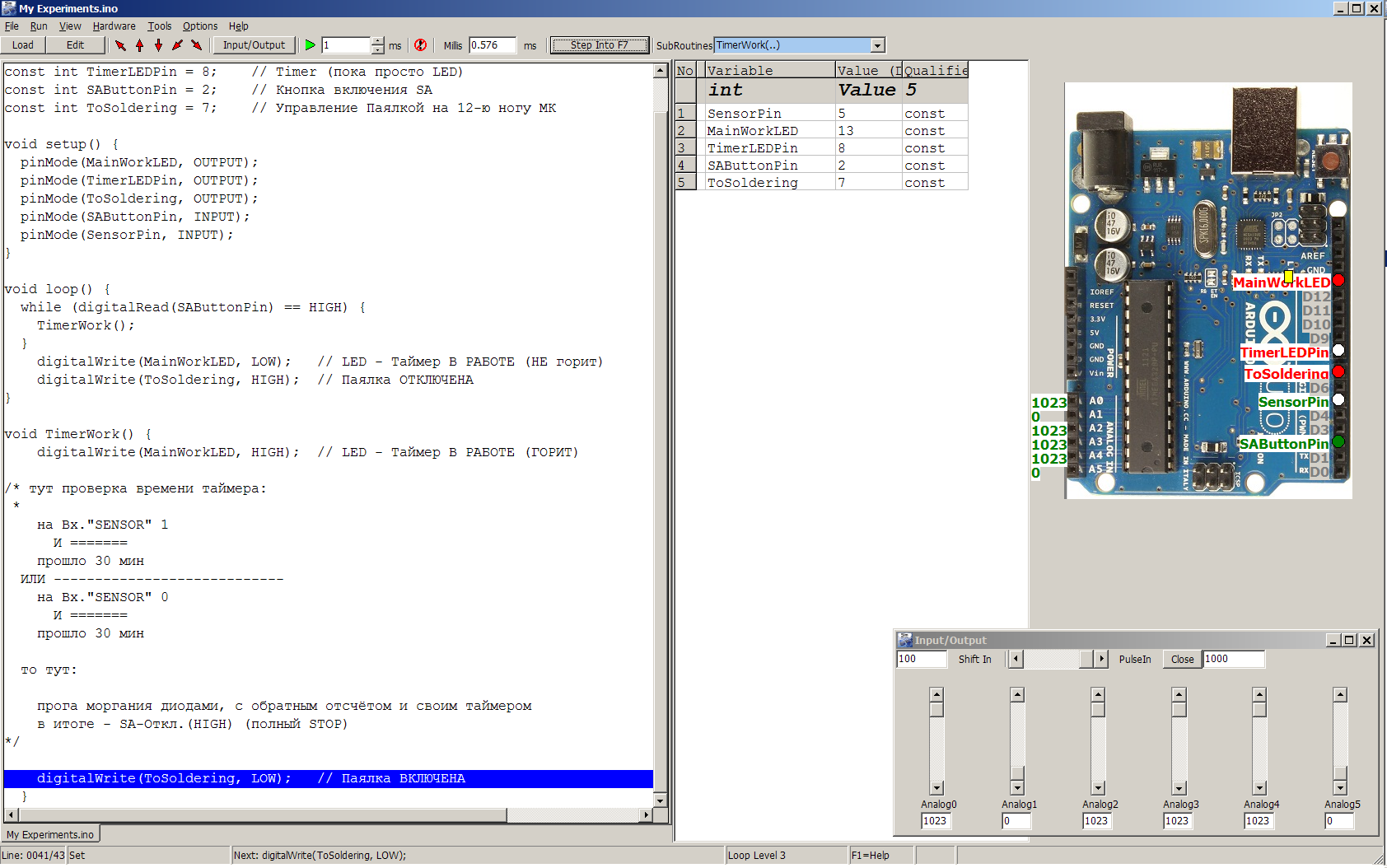
Всё, со всем разобрался. Начал писать программу. Проверил - уже начинает работать. Что потребовалось:
1. Simulator for Arduino Pro 0.99B (именно этой версии, т.к. только под нее есть таблетка)
2. Arduino 1.6.5-r5 - 2015.08.28 - куча примеров и в ней пишу сам код, потом его копи/пасте в Simulator.
3. Отменная статья Микроконтроллеры. Начало. STM32.
Уже работающий кусок проги и как выглядит обкатка на симуляторе...
Начал с изложения логики идеи в текстовом файлике - как должно быть:
1. пошло питание на МК
2. на OUT = "HIGH" (1)
3. опрашиваем SA
если SA-Откл.(HIGH) то полный STOP, на OUT = "HIGH" (дальше ничего вообще не делаем)
если SA-ВКЛЮЧЕН, то:
1. подаём на OUT = "LOW" (на массу!)
И =======
2т. Запуск таймера "2т"...
если опять SA-Откл.(HIGH) то полный STOP, на OUT = "HIGH" (дальше ничего вообще не делаем)
// "2т" (Таймер имеет сброс, Если на Вх."SENSOR" происходит смена значения -> рестарт и новый счет)
на Вх."SENSOR" 1
И =======
прошло 30 мин
ИЛИ ----------
на Вх."SENSOR" 0
И =======
прошло 30 мин
то
прога моргания диодами, с обратным отсчётом и своим таймером
в итоге - SA-Откл.(HIGH) (полный STOP)
иначе опять начало счёта таймера с точки "2т"
1. Simulator for Arduino Pro 0.99B (именно этой версии, т.к. только под нее есть таблетка)
2. Arduino 1.6.5-r5 - 2015.08.28 - куча примеров и в ней пишу сам код, потом его копи/пасте в Simulator.
3. Отменная статья Микроконтроллеры. Начало. STM32.
Уже работающий кусок проги и как выглядит обкатка на симуляторе...
Спойлер
Начал с изложения логики идеи в текстовом файлике - как должно быть:
1. пошло питание на МК
2. на OUT = "HIGH" (1)
3. опрашиваем SA
если SA-Откл.(HIGH) то полный STOP, на OUT = "HIGH" (дальше ничего вообще не делаем)
если SA-ВКЛЮЧЕН, то:
1. подаём на OUT = "LOW" (на массу!)
И =======
2т. Запуск таймера "2т"...
если опять SA-Откл.(HIGH) то полный STOP, на OUT = "HIGH" (дальше ничего вообще не делаем)
// "2т" (Таймер имеет сброс, Если на Вх."SENSOR" происходит смена значения -> рестарт и новый счет)
на Вх."SENSOR" 1
И =======
прошло 30 мин
ИЛИ ----------
на Вх."SENSOR" 0
И =======
прошло 30 мин
то
прога моргания диодами, с обратным отсчётом и своим таймером
в итоге - SA-Откл.(HIGH) (полный STOP)
иначе опять начало счёта таймера с точки "2т"
- Код:
const int SensorPin = 5; // Геркон или датчик положения/наклона
const int MainWorkLED = 13; // встроенный LED, он же MainWorkLED
const int TimerLEDPin = 8; // Timer (пока просто LED)
const int SAButtonPin = 2; // Кнопка включения SA
const int ToSoldering = 7; // Управление Паялкой на 12-ю ногу МК
void setup() {
pinMode(MainWorkLED, OUTPUT);
pinMode(TimerLEDPin, OUTPUT);
pinMode(ToSoldering, OUTPUT);
pinMode(SAButtonPin, INPUT);
pinMode(SensorPin, INPUT);
}
void loop() {
while (digitalRead(SAButtonPin) == HIGH) {
TimerWork();
}
digitalWrite(MainWorkLED, LOW); // LED - Таймер В РАБОТЕ (НЕ горит)
digitalWrite(ToSoldering, HIGH); // Паялка ОТКЛЮЧЕНА
}
void TimerWork() {
digitalWrite(MainWorkLED, HIGH); // LED - Таймер В РАБОТЕ (ГОРИТ)
/* тут проверка времени таймера:
*
на Вх."SENSOR" 1
И =======
прошло 30 мин
ИЛИ ----------
на Вх."SENSOR" 0
И =======
прошло 30 мин
то тут:
прога моргания диодами, с обратным отсчётом и своим таймером
в итоге - SA-Откл.(HIGH) (полный STOP)
*/
digitalWrite(ToSoldering, LOW); // Паялка ВКЛЮЧЕНА
}
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Чт июн 16, 2016 19:38:07
AndroVet писал(а):Всё, со всем разобрался. Начал писать программу. Проверил - уже начинает работать.
- Код:
.... "А Я только телики ламповые ваяю......"
Это великолепно, что сами разберётесь! (ARDUINO конечно очень избыточна, но одна микросхема и куча возможностей, я ЗА)
Пора уже пришла, изучайте далее, очень пригодится прокачивать/тюнинговать ваше устройство.
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Чт дек 22, 2016 11:02:53
Доброго! Приобрёл такое чудо техники только из-за фена - нужен был для локального микропрогрева при тюнинге фар. Все работало отлично. Но вот понадобился паяльник и: О! Чудо! - хрен работает! При подсоединении к разъему сразу начинает греться (без включения). Нагревается до 372С и всё, выключатель существует только для включения индикатора, на регулировку температуры все (опять же кроме индикатора) - "клали"
Вопрос к ТС: нет ли схемки случайно? Паяльник нуже-е-ен!)))
Вопрос к ТС: нет ли схемки случайно? Паяльник нуже-е-ен!)))
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Чт дек 29, 2016 22:12:32
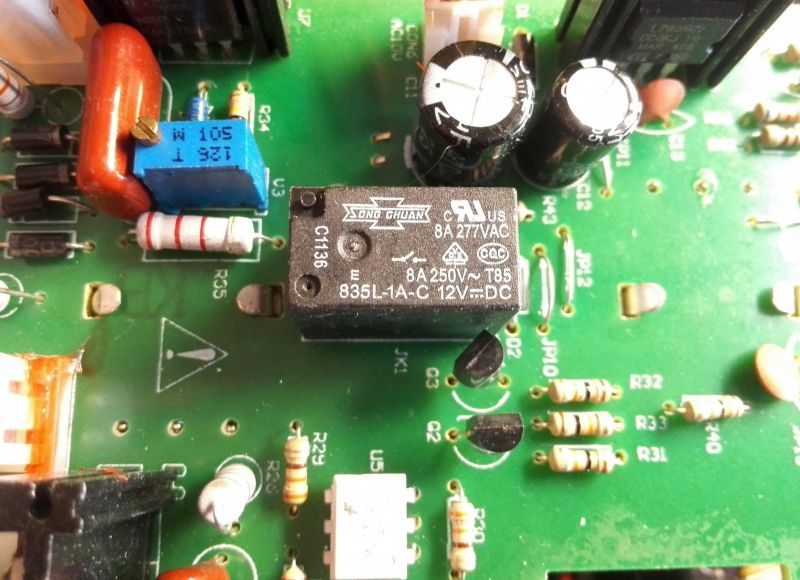
Очень нужна помощь. Переделываю все по выше приведенной схеме и...запутался с обозначениями резисторов. Непонятно как приделать резисторы R31,R32? На плате такие резисторы есть но они другого номинала и как видно из картинок их не трогали. Я так понимаю тут имеются ввиду дополнительные резисторы которые на отдельной платке? Так как это дело совместить?
Добавлено after 1 hour 35 minutes 48 seconds:
Re: Паяльная станция Element (YIHUA) 852D+ переделка, доработка.
Со схемой вроде как разобрался. Есть еще вопрос....что значит вот это? на холодном терморезисторе добился комнатных 20 градусов крутил сначала R4, затем более точно - R32. Отключил как сказано нагреватель кручу резисторы и ничего не происходит. На табло 016 ....что такое температура холодного спая и как ее измерить?
Вроде как это для термопары и в керамическом нагревателе терморезистор.
Добавлено after 1 hour 35 minutes 48 seconds:
Re: Паяльная станция Element (YIHUA) 852D+ переделка, доработка.
Со схемой вроде как разобрался. Есть еще вопрос....что значит вот это? на холодном терморезисторе добился комнатных 20 градусов крутил сначала R4, затем более точно - R32. Отключил как сказано нагреватель кручу резисторы и ничего не происходит. На табло 016 ....что такое температура холодного спая и как ее измерить?
Вроде как это для термопары и в керамическом нагревателе терморезистор.
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Пт дек 30, 2016 09:41:30
Вопщем разобрался все нормально -работает. Только чето температура какая то нелинейная. Если скажем точно отрегулировать например на 300гр. то на 200 или на 450 будет +- 5-10гр. И потом с разными жалами тоже разная температура. Кароче особого профита по сравнению с нихромом я не увидел.
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Вс янв 22, 2017 10:44:22
Ух, давно не заходил... По порядку:
1. Главный "профит" керамики - не липнет к большим полигонам. А так - и долговечнее, и быстрее греется, и быстрее реагирует на изменения темп.
2. Если калибровать на 250гр. то практически линейно - когда менее 150, то +2-3гр., а когда больше 350гр, то -3-4гр. и мне кажется, что это очень не плохо.
3. с жалами отдельная песня... из 20 шт. отбраковал сразу ТРЕТЬ! у них у всех РАЗНАЯ посадочная ГЛУБИНА. Берём штанген, и меряем... будете очень сильно удивлены. Оставил себе в работу только те, у которых получается внутренний зазор 0.2-0.4мм до кончика керамики.
4. при измерении температуры (например, для калибровки) - всегда используйте термопасту (КПТ-8), т.е. термопара не тупо в припой на паяльнике, а с чутком термопасты.
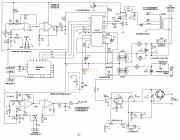
5. Схема есть, оригинальная, проверенная. Присоединяю.
СХЕМА:
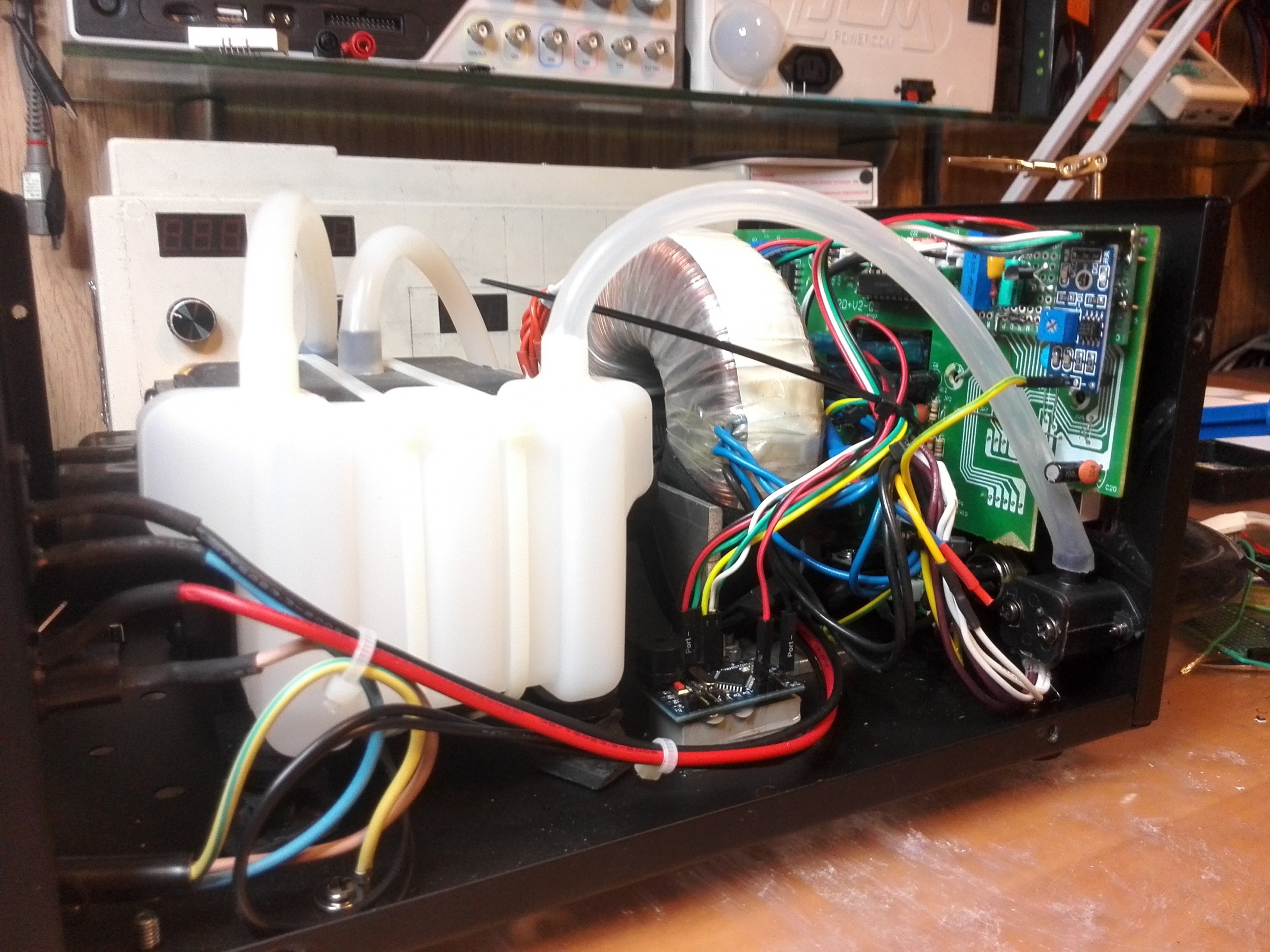
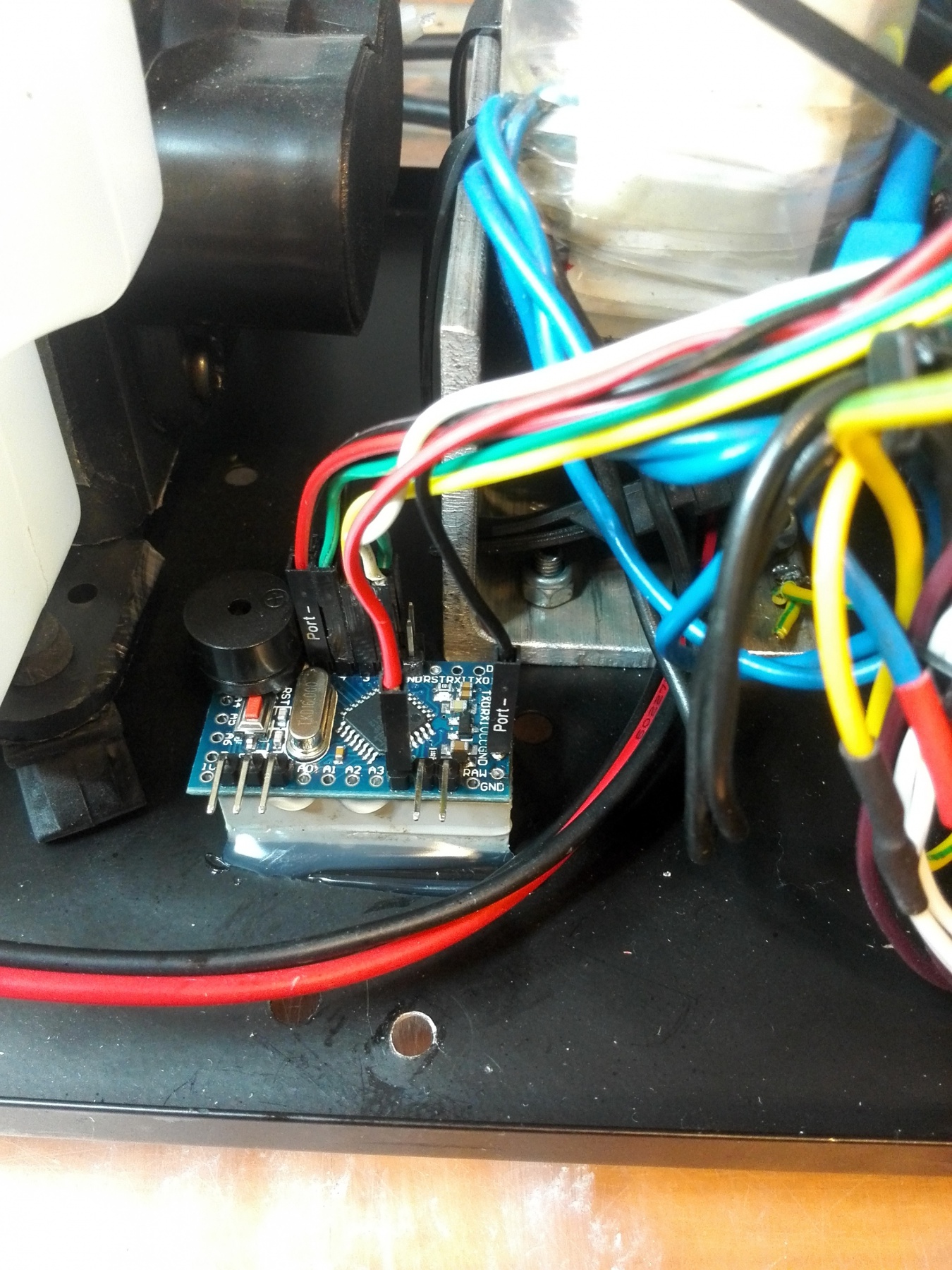
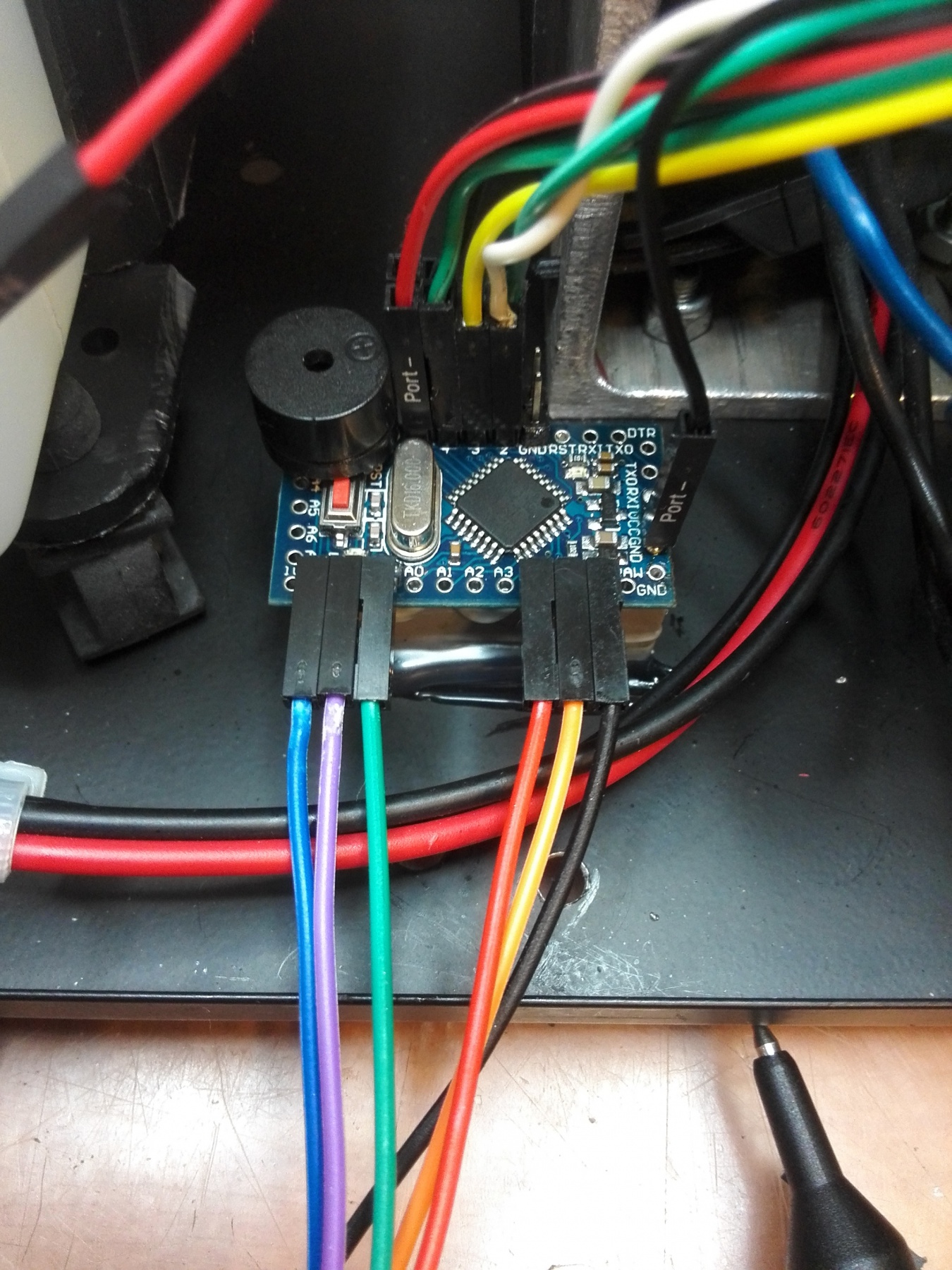
 Таймер (фото и видео):
Таймер (фото и видео):
Быдло-код:в архиве - скетч для Arduino Mini (pro), и файл Excell для подстановки значений сработок таймера. Если строка с секундами пустая, расчёт по верхней строке - с минутами. Секунды делал для обкатки. На видео как раз с секундными значениями таймера.
PS: в коде ни одного wait и сделано на прерываниях
и сделано на прерываниях  тем не менее, курил интернет много месяцев, но так и не смог сделать пиканье как-то по другому. Понимаю, что и для временнЫх диапазонов и для буззера наверняка как-то можно всё сделать проще... но пока так. Получил КУЧИЩУ помощи от другана, который пишет софт под винду. В одного бы точно потребовался не один год... Всё работает.
тем не менее, курил интернет много месяцев, но так и не смог сделать пиканье как-то по другому. Понимаю, что и для временнЫх диапазонов и для буззера наверняка как-то можно всё сделать проще... но пока так. Получил КУЧИЩУ помощи от другана, который пишет софт под винду. В одного бы точно потребовался не один год... Всё работает.
PPS: категорически приветствую критику кода... вдруг сюда совершенно случайно заскочит специалист по программированию МК...
1. Главный "профит" керамики - не липнет к большим полигонам. А так - и долговечнее, и быстрее греется, и быстрее реагирует на изменения темп.
2. Если калибровать на 250гр. то практически линейно - когда менее 150, то +2-3гр., а когда больше 350гр, то -3-4гр. и мне кажется, что это очень не плохо.
3. с жалами отдельная песня... из 20 шт. отбраковал сразу ТРЕТЬ! у них у всех РАЗНАЯ посадочная ГЛУБИНА. Берём штанген, и меряем... будете очень сильно удивлены. Оставил себе в работу только те, у которых получается внутренний зазор 0.2-0.4мм до кончика керамики.
4. при измерении температуры (например, для калибровки) - всегда используйте термопасту (КПТ-8), т.е. термопара не тупо в припой на паяльнике, а с чутком термопасты.
5. Схема есть, оригинальная, проверенная. Присоединяю.
СХЕМА:
Спойлер

Быдло-код:

Спойлер
- Код:
#define T1 1080000
#define T2 1080120
#define T3 1320120
#define T4 1320240
#define T5 1320290
#define T6 1320390
#define T7 1500390
#define T8 1500510
#define T9 1500560
#define T10 1500680
#define T11 1500730
#define T12 1500830
#define T13 1620830
#define T14 1621680
#define T15 1681680
int OutPut = 4; // 13-Test! 4-REAL OutPut OUTPUT to Soldering ON / OFF (OptoCouple | Gerkon)
int Beeper = 7; // Buzzer PinOUTPUT (BEEPer)
int Sensor = 2; // Sensor (vibration / position / shock)
int Switch = 3; // Switch (to ON => short to GND!)
volatile int TimLed = 5; // TimerLED: Time to OFF elapsed...
volatile int inter = 0; // Main MyFunc
unsigned long millis_start = 0;
unsigned long millis_real = 0;
unsigned long Timer_ = 0;
uint8_t blink_loop = 0;
uint8_t blink_mode = 0B00000000;
uint8_t modes_count = 0;
uint16_t n = 63583; //4 time/sec
void setup()
{
pinMode(TimLed, OUTPUT);
pinMode(OutPut, OUTPUT);
pinMode(Beeper, OUTPUT);
pinMode(Sensor, INPUT);
pinMode(Switch, INPUT);
digitalWrite(TimLed, LOW);
digitalWrite(OutPut, LOW);
digitalWrite(Sensor, HIGH);
digitalWrite(Switch, HIGH);
millis_start = millis();
millis_real = millis();
blink_mode = 0B00000000;
attachInterrupt(0, blink, CHANGE);
attachInterrupt(1, blink, FALLING);
TCCR1A = 0;
TCCR1B = 1<<CS22 | 0<<CS21 | 1<<CS20;
TIMSK1 = 1<<TOIE1;
TCNT1 = n;
sei();
}
ISR(TIMER1_OVF_vect) {
if(blink_mode & 1<<(blink_loop&0x07) ) digitalWrite(TimLed, HIGH);
else digitalWrite(TimLed, LOW);
blink_loop++;
TCNT1 = n; }
void blink() {inter=1;}
void loop() {
while (digitalRead(Switch) == LOW)
{
if(inter==1) {
digitalWrite(OutPut, HIGH);
blink_mode = 0B00000000;
inter = 0;
millis_start = millis();
millis_real = millis(); }
Timer_= millis_real-millis_start;
millis_real = millis();
if(Timer_ >= 1 && Timer_ < T1) blink_mode = 0B00000000; // WORK Time (Normal, Main, First)
if(Timer_ >= T1 && Timer_ < T2) { // 1st 1x-BEEP 150ms
blink_mode = 0B00000000;
tone (Beeper, 2000, 10); }
if(Timer_ >= T2 && Timer_ < T3) blink_mode = 0B00000001; // WORK Time + "BLINK-1" 1x/SEC
if(Timer_ >= T3 && Timer_ < T4) { // 2st 1x-BEEP 150ms
blink_mode = 0B00000000;
tone (Beeper, 2000, 10); }
if(Timer_ >= T4 && Timer_ < T5) noTone (Beeper);
if(Timer_ >= T5 && Timer_ < T6) { // 2st 2x-BEEP 150ms
blink_mode = 0B00000000;
tone (Beeper, 2000, 10); }
if(Timer_ >= T6 && Timer_ < T7) blink_mode = 0B00000101; // WORK Time + "Blink-2" 2x/SEC
if(Timer_ >= T7 && Timer_ < T8) { // 3st 1x-BEEP 150ms
blink_mode = 0B00000000;
tone (Beeper, 2000, 10); }
if(Timer_ >= T8 && Timer_ < T9) noTone (Beeper); // BEEP-Pause, Tone OFF
if(Timer_ >= T9 && Timer_ < T10) { // 3st 2x-BEEP 150ms
blink_mode = 0B00000000;
tone (Beeper, 2000, 10); }
if(Timer_ >= T10 && Timer_ < T11) noTone (Beeper); // BEEP-Pause, Tone OFF
if(Timer_ >= T11 && Timer_ < T12) { // 3st 3x-BEEP 150ms
blink_mode = 0B00000000;
tone (Beeper, 2000, 10); }
if(Timer_ >= T12 && Timer_ < T13) blink_mode = 0B00010101; // WORK Time + "Blink-3" (x3/sec)
if(Timer_ >= T13 && Timer_ < T14) { // LONG last BEEP
blink_mode = 0B00000000;
tone (Beeper, 2000, 50); }
if(Timer_ >= T14 && Timer_ < T15) blink_mode = 0B01010101; // WORK Time + "Blink-4" (x4/sec)
if(Timer_ >= T15){
digitalWrite(OutPut, LOW);
blink_mode = 0B00001111; } // "Blink-5" (0.5/sec)
}
digitalWrite(OutPut, LOW);
blink_mode = 0B00000000;
noTone (Beeper);
}
PS: в коде ни одного wait
PPS: категорически приветствую критику кода... вдруг сюда совершенно случайно заскочит специалист по программированию МК...
- Вложения
-
- Timer.rar
- (4.47 KiB) Скачиваний: 273
Re: Паяльная станция Element (YIHUA) 852D+ переделка, дорабо
Чт фев 09, 2017 13:25:31
AndroVet писал(а):Понимаю, что и для временнЫх диапазонов и для буззера наверняка как-то можно всё сделать проще.
На таймерах нормально (без WAIT) в ПК типа Спектрум так и делается,( музычка на аппарантом прерывании по одной ноте отдаёт за прерывание)
Я так на АВРках делаю опрос энкодера, чтоб без WAIT и INT'ов