Re: ФУОЗ на базе AC-CDI
Чт янв 11, 2018 21:32:37
Попробую проверить, а на каких оборотах(RPM/min) это происходит? Ранее об этом ничего не слышал(0х80=128, для компилятора все равно), и на форуме не давал сырых вещей, они все тестировались, более того сам на мото использую эту прошивку, предпоследнюю без флая, если бы не зима последнюю бы тоже обкатал.
В случае любых багов можно было просто написать: не работает, сразу бы отреагировал, а так ваше сообщение затерялось среди других записей.
В случае любых багов можно было просто написать: не работает, сразу бы отреагировал, а так ваше сообщение затерялось среди других записей.
Re: ФУОЗ на базе AC-CDI
Пт янв 12, 2018 09:47:17
Flash.#13
Отменяется!!
Тестировал на второй версии. Если 15 то импульс приблизительно 40мкс, а если 0х80=128 , то 400мкс.
И просто осциллограф на медленной развертке 50mc не ловит все короткие импульсы. (Цифровой, китайский).
Когда установил входные тоже 40-50мкс, то осцил тоже начал "тупить" по входу первого канала, с пропусками.
Но. И этот мой прокол помог понять как происходит в программе формирование длины импульса. Т.е. , как описано в проге (не отнимая времени от работы ЦП). Как я понял, программа работает , но за каждый цикл добавляется единичка длины вых импульса.
Теперь мне нужно "впихнуть" в этот цикл еще один импульс после паузы на другой порт.
Идею с отдельной подпрограммой для формирования длины импульса надо тоже проверить. Т.е. если есть импульс, то будет удлинение всего цикла задержкой внутри цикла на длину вых импульса. Но таймер работает все равно. Буду эксперементировать. Мне надо два импульса!!
Отменяется!!
Тестировал на второй версии. Если 15 то импульс приблизительно 40мкс, а если 0х80=128 , то 400мкс.
И просто осциллограф на медленной развертке 50mc не ловит все короткие импульсы. (Цифровой, китайский).
Когда установил входные тоже 40-50мкс, то осцил тоже начал "тупить" по входу первого канала, с пропусками.
Но. И этот мой прокол помог понять как происходит в программе формирование длины импульса. Т.е. , как описано в проге (не отнимая времени от работы ЦП). Как я понял, программа работает , но за каждый цикл добавляется единичка длины вых импульса.
Теперь мне нужно "впихнуть" в этот цикл еще один импульс после паузы на другой порт.
Идею с отдельной подпрограммой для формирования длины импульса надо тоже проверить. Т.е. если есть импульс, то будет удлинение всего цикла задержкой внутри цикла на длину вых импульса. Но таймер работает все равно. Буду эксперементировать. Мне надо два импульса!!
Re: ФУОЗ на базе AC-CDI
Пт янв 12, 2018 12:57:28
Вы меня напугали в багах программы, а оказывается дело то было... Там кстати в программе подсказка 6mks/1, 15*6=60мкс, 128*6=748мкс. Вы зря себя мучаете, версия с двойным импульсом решит существующие проблемы со стартом лодочного, подождите ее, и будет новый код для "мучить".
Re: ФУОЗ на базе AC-CDI
Пт янв 12, 2018 23:22:23
Flash.#13
Все ОК. Два варианта плат готовы, и прошивки подготовил разные варианты. Третья плата навороченая, в работе.
Вот прочитал на другом форуме.
При увеличении скорости движения увеличивается масса магнита и соответственно от массы увеличиваются магнитное поле магнита которое датчик почувствует раньше.
Имеется ввиду околосветовая скорость
E=MC²
Все ОК. Два варианта плат готовы, и прошивки подготовил разные варианты. Третья плата навороченая, в работе.
Вот прочитал на другом форуме.
При увеличении скорости движения увеличивается масса магнита и соответственно от массы увеличиваются магнитное поле магнита которое датчик почувствует раньше.
Имеется ввиду околосветовая скорость
E=MC²
Re: ФУОЗ на базе AC-CDI
Сб янв 13, 2018 06:24:35
ну, да, написано ж про скорость движения.
вот там, похоже, настоящие гонщики тусуются
а может у них и тема называется "CDI для космолёта"?
Добавлено after 2 minutes:
только относительно датчика магнит остается прежним, он будет изменяться только для зрителей на обочине...
вот там, похоже, настоящие гонщики тусуются
а может у них и тема называется "CDI для космолёта"?
Добавлено after 2 minutes:
только относительно датчика магнит остается прежним, он будет изменяться только для зрителей на обочине...
Re: ФУОЗ на базе AC-CDI
Сб янв 13, 2018 11:45:08
почитал зажигание Ситникова. Добавил вот такую штуку. Кашу маслом не испортишь.
ldi R19,250
sub R19,R21
sbic PinC,0 ;выполнить если бит порта "1"
inc R18 ;+1
cp R18, R19
ldi R19,250
sub R19,R21
sbic PinC,0 ;выполнить если бит порта "1"
inc R18 ;+1
cp R18, R19
Re: ФУОЗ на базе AC-CDI
Вс янв 14, 2018 10:34:34
Ето что такое: новая физика или просто более сильньйе наркотики??asel писал(а):При увеличении скорости движения увеличивается масса магнита и соответственно от массы увеличиваются магнитное поле магнита.
Re: ФУОЗ на базе AC-CDI
Вс янв 14, 2018 11:15:22
Еще немного опишу о графике.
Интересно то, что угол в реальности изменяется плавно, а не ступеньками, как в графике. Почему так, не знаю. Есть только "ну Очень" небольшие "прыжки".
Еще немного, о том как писать и как работает график. Это нужно знать. Особенно на малых и мах оборотах.
например.
900 = 4 град
1000= 5 град
1100= 6 град
так вот. Переход на градус выше происходит при превышении оборота.
Т.е если оборот 920 , то угол будет уже как по 1000= 5 градусов.
А если оборот уже 950, то угол будет около 5.3 градусов.
При превышении 1000 об , угол сразу будет по 1100=6 град.
ну и т.д.
Или иначе пояснить.... если обороты 950, то угол будет 5.2 градусов!!. а не 4.5градуса
Поэтому еще давно, я переписал шаги на малых оборотах через 100град.
Смотрел осцилографом. Может я ошибся?
Считал так. 967об , частота 16.13гц, период 60мс, 1град=0.1722мс
Импульс от вх импульса 4.25мс. 4.25/0.1722=24.68grad 30-24.68=5.3grad
Интересно то, что угол в реальности изменяется плавно, а не ступеньками, как в графике. Почему так, не знаю. Есть только "ну Очень" небольшие "прыжки".
Еще немного, о том как писать и как работает график. Это нужно знать. Особенно на малых и мах оборотах.
например.
900 = 4 град
1000= 5 град
1100= 6 град
так вот. Переход на градус выше происходит при превышении оборота.
Т.е если оборот 920 , то угол будет уже как по 1000= 5 градусов.
А если оборот уже 950, то угол будет около 5.3 градусов.
При превышении 1000 об , угол сразу будет по 1100=6 град.
ну и т.д.
Или иначе пояснить.... если обороты 950, то угол будет 5.2 градусов!!. а не 4.5градуса
Поэтому еще давно, я переписал шаги на малых оборотах через 100град.
Смотрел осцилографом. Может я ошибся?
Считал так. 967об , частота 16.13гц, период 60мс, 1град=0.1722мс
Импульс от вх импульса 4.25мс. 4.25/0.1722=24.68grad 30-24.68=5.3grad
Re: ФУОЗ на базе AC-CDI
Вс янв 14, 2018 16:42:34
asel не совсем так, если обороты 920 то угол будет как на 900, что соответствует "ступенчатости" графика. Переключение происходит по достижении оборотов, и дальше выдерживается угол до новой ячейки графика(проверялось цифровым тахометром). Шаг квантования 0.7 градуса, программа графиков разрешает вводить дробные углы. А небольшой дрейф что вы наблюдаете связан с магнитным датчиком, при росте оборотов амплитуда импульса растет, и чуть уезжает сам датчик, оптрон открывается на росте амплитуды, а не на вершине пика.
Чтобы не мучится расчетами "вручную" была придумана программа правки углов графика.
На всякий случай уточню, ступенчатость графика не означает "грубые углы", расчет идет в "реальном времени", и для каждого оборота считается его реальная задержка. Это отличает работу кода от программ где 200 ступенек но нет расчета, и раннее рассчитанные на ПК задержки берутся с памяти МК. Поэтому даже если задать 5 ступенек, угол плавать не будет.
Чтобы не мучится расчетами "вручную" была придумана программа правки углов графика.
На всякий случай уточню, ступенчатость графика не означает "грубые углы", расчет идет в "реальном времени", и для каждого оборота считается его реальная задержка. Это отличает работу кода от программ где 200 ступенек но нет расчета, и раннее рассчитанные на ПК задержки берутся с памяти МК. Поэтому даже если задать 5 ступенек, угол плавать не будет.
Re: ФУОЗ на базе AC-CDI
Вс янв 14, 2018 17:10:57
Flash.#13
не знаю. Родную. программу так не тестил. Тестил свои навороченные и перекрученые..
Тестил осцилографом!! Неприятно долго, потому что приходится считать на калькуляторе....
Почему тестил? Потому что реально закончил со всеми вариантами программ на три варианта плат и в конце решил еще раз погонять их осцилографом. И заметил, .... а чего это нет ступенек.. а все плавно.... Факт есть. Описал выше.
а все плавно.... Факт есть. Описал выше.
Для достоверности, придется еще раз поработать и протестировать оригиналы программ с форума.
Проверю , отпишусь
не знаю. Родную. программу так не тестил. Тестил свои навороченные и перекрученые..
Тестил осцилографом!! Неприятно долго, потому что приходится считать на калькуляторе....
Почему тестил? Потому что реально закончил со всеми вариантами программ на три варианта плат и в конце решил еще раз погонять их осцилографом. И заметил, .... а чего это нет ступенек..
Для достоверности, придется еще раз поработать и протестировать оригиналы программ с форума.
Проверю , отпишусь
Re: ФУОЗ на базе AC-CDI
Пн янв 15, 2018 19:10:56
Пересчитал.
Надоело бороться с мелкими фолами. Закончил.
То что написал выше ... все с точностью наоборот.
Например. При превышении 1000 об , угол будет не 5+, а 4+. Т.е. от предыдущего 900об=4градуса.
Плюс еще есть три нюанса, которые вычислил и мне они понятны теперь.
Смотрел цифровым двухлучевым осцилографом (завтра надо отдать ), а не какими то кругами с черточками и стробоскопом. Осцилограф не обманешь. Четко показывает и высчитывает частоты, период,показывает как ведет себя импульс и т.п.
), а не какими то кругами с черточками и стробоскопом. Осцилограф не обманешь. Четко показывает и высчитывает частоты, период,показывает как ведет себя импульс и т.п.
как писал Флэш - "ездить можно..."
Но меня больше интересовала стабильность на низких и х.х оборотах, где влияют 1-2 градуса, и помехоустойчивость. А это все видно только осцилографом. В принципе, разобрался и кое-чего добил в программе.
Надоело бороться с мелкими фолами. Закончил.
То что написал выше ... все с точностью наоборот.
Например. При превышении 1000 об , угол будет не 5+, а 4+. Т.е. от предыдущего 900об=4градуса.
Плюс еще есть три нюанса, которые вычислил и мне они понятны теперь.
Смотрел цифровым двухлучевым осцилографом (завтра надо отдать
как писал Флэш - "ездить можно..."
Но меня больше интересовала стабильность на низких и х.х оборотах, где влияют 1-2 градуса, и помехоустойчивость. А это все видно только осцилографом. В принципе, разобрался и кое-чего добил в программе.
Re: ФУОЗ на базе AC-CDI
Вс фев 04, 2018 17:49:12
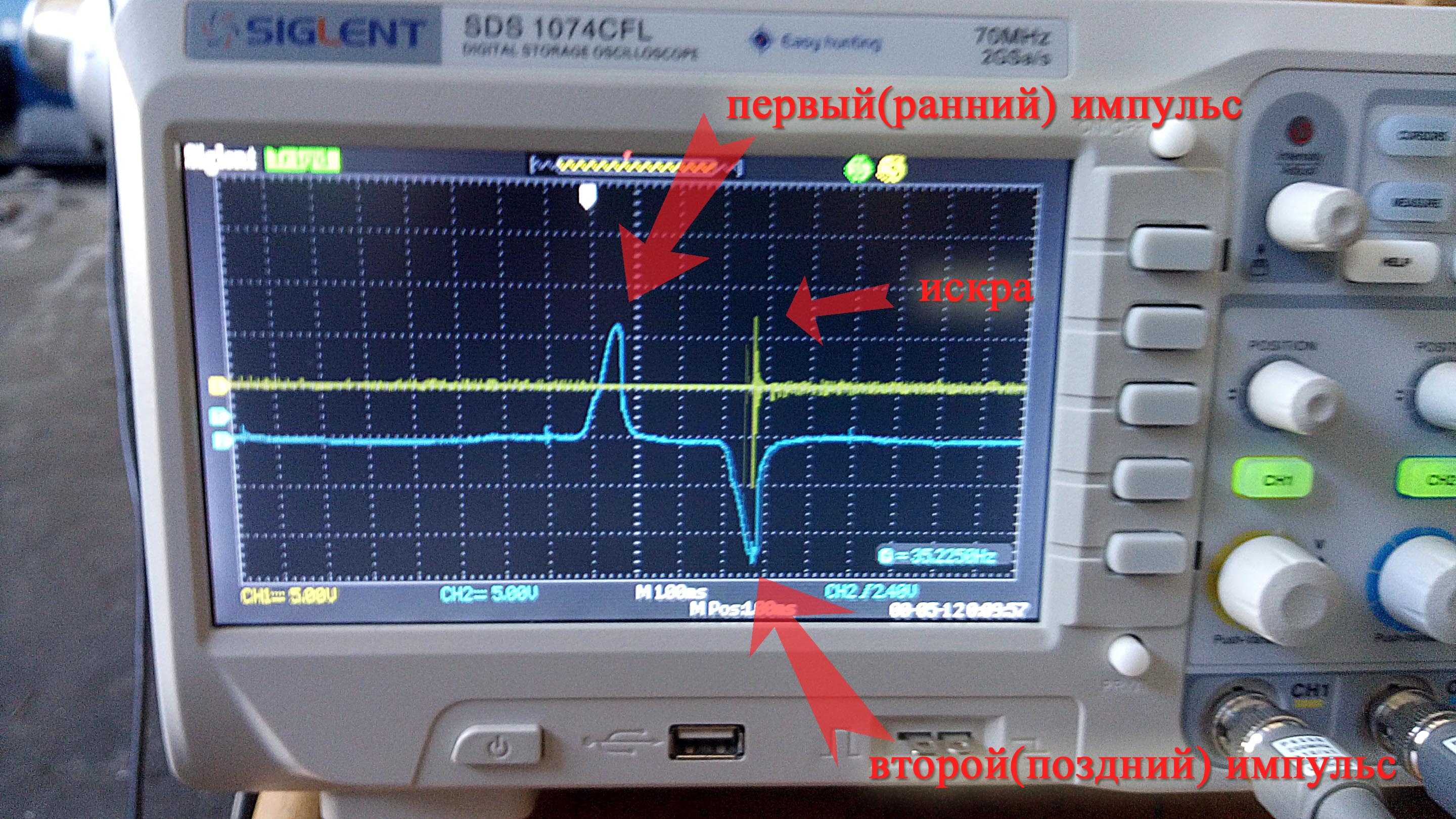
Свершилось, новая версия программы с двухполярным сигналом датчика. Небольшая предистория, система расчета ФУОЗ базируется на раннем(первом) импульсе индукционного датчика, при работе двигателя все хорошо, но вот при запуске возникает инерционная временная составляющая. Выглядит это так, в момент старта двигателя, особенно на кик-стартере, поршень пересекает раннюю магнитную метку вала, дается импульс, МК считает, но из-за нестабильности оборотов, и инерционности схемы, в момент расчетной искры поршень может не дойти до нужной точки. Для запуска эта точка 1-2 градуса после ВМТ, но если инертность вращения ее отбросит, на 5-7 градусов до ВМТ, мы почувствуем неприятную "отдачу".
Эта погрешность расчета носит сугубо механический характер, вес поршневой группы, и моменты трения+инерция не позволяют раскрутить движок на старте, линейно и быстро. При чем с увеличением объема это сказывается сильнее. Например на двигателях 150сс и менее, этот "эффект" почти незаметен, а на 400сс он уже может травмировать.
В стоковых решениях с этой проблемой борются использованием обеих фронтов импульса магнитного датчика. Ранний импульс хорош для работы двигателя, а поздний отстает от него, на угол длинны металлического наплыва метки вала, и хорош для запуска.


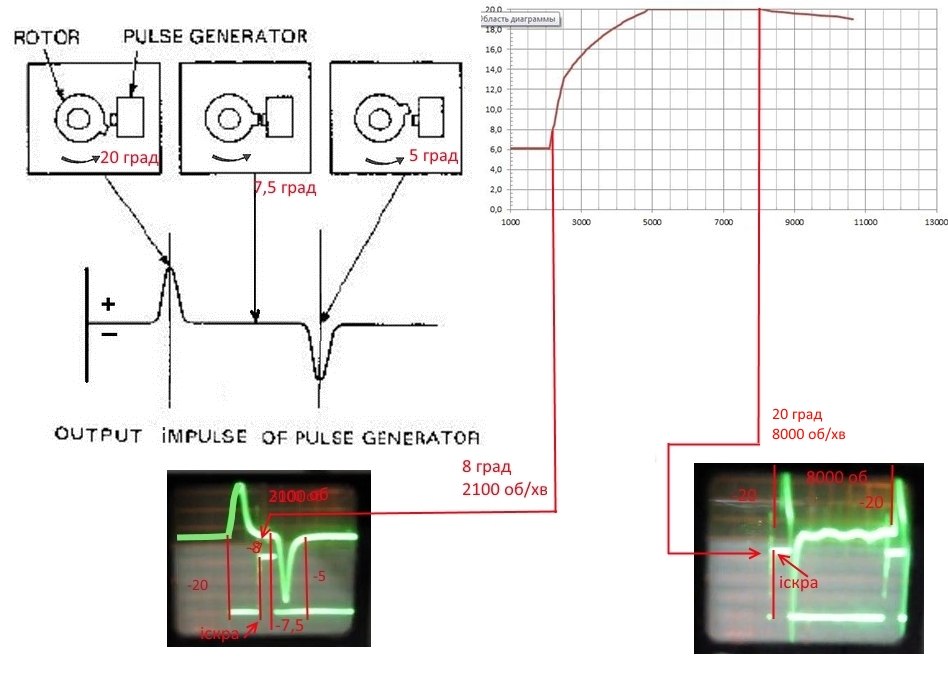
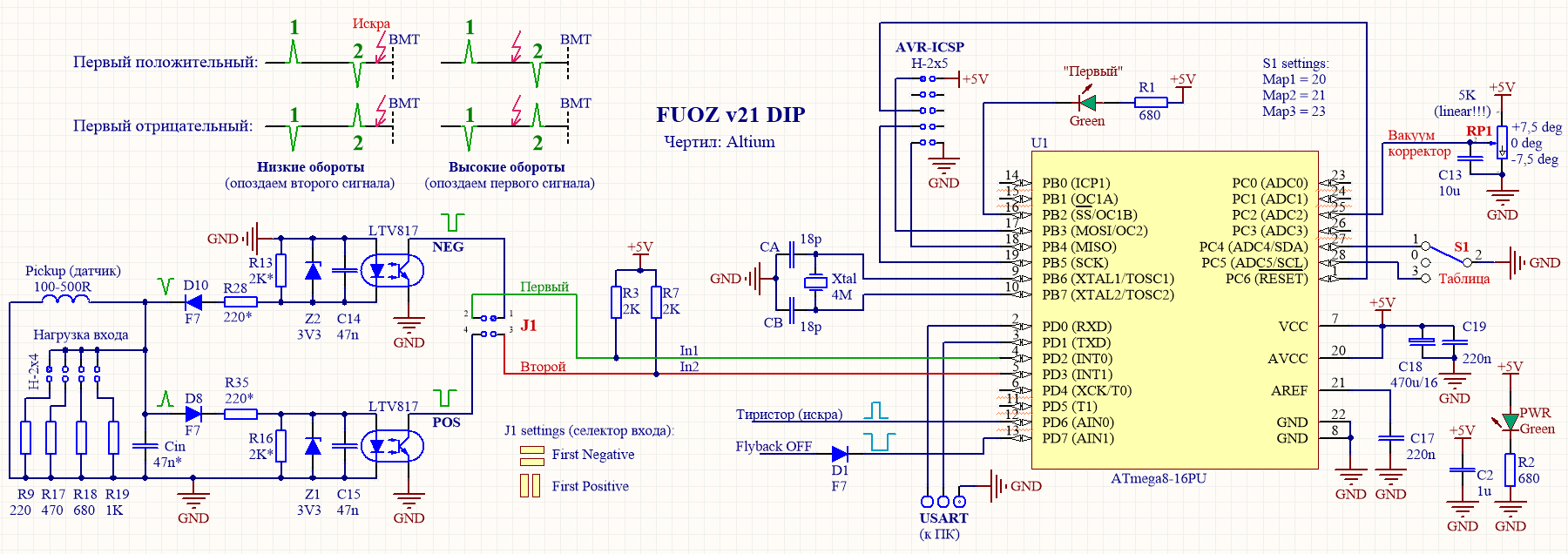
Логика здесь простая, импульс запуска проходит после второго сигнала, но в связи с особенностями работы МК, пришлось изменить схему, а именно: ввести второй канал с оптроном. Включен второй РС817 с обратной полярностью, это обеспечивает приход сигналов на разные ноги МК.
По схеме, входы сигнала были изменены по двум причинам: использование хардварного прерывания захвата сигнала, и необходимостью освободить линии даты RXD/TXD для связи с ПК "онлайн". А вот выход сигнала не столь критичен, в ПО правки графиков теперь предусмотрена настройка пина выходного сигнала, поскольку в DIP и SMD удобность разводки отличается. Появился выход PB2, на нем происходит индикация работы МК по второму сигналу, проще говоря светодиод на нем светится, когда мотор заводится, и на низких оборотах. Еще есть РВ7 - выход управления flyback, отключает генерацию питания на момент искры, его работа показана в схеме от Altium. Этот пин не мешает процессу, в схеме где он не используется, можно просто повесить в воздухе. На PD0/PD1 планируется подключать связь к ПК, в беспроводном варианте переходника это довольно удобно. РС1 пока что остается за резистором/вакуумом, но код по нему не готов. По схемным изменением вроде все.
Программные изменения, тут все гораздо сложнее, совокупность правок довольно большая, код можно считать новой версией - 2.0, и он не совместим с ПО графиков старой версии, точно так же как ПО графиков не совместимо с файлами ранних версий. Но есть и хорошие новости, ФУОЗ версии 2.0 может нормально работать со старой платой(один импульс), правда ногу сигнала придется перекинуть по новой схеме, с PD0 на PD2.
В программе графиков как и раньше нужно задавать угол первого (раннего) импульса, а вол угол второго МК определит самостоятельно. Работает это так:
- заводим;
- держим обороты от 1200 до 1500;
- ждем 10 секунд.
Обычно МК достаточно 3-5 секунд для замера, ну максимум 10, результат фильтруется от ошибок и хранится в ПЗУ чипа. При последующих включениях он будет проверять ничего ли не изменилось, но уже при старте будет использоваться замеренная величина угла позднего импульса. При этом если схема старая, и импульс один, МК это распознает и понимает. Замеренный угол уже сейчас можно считать с EEPROM, например с eXtreme Burner. Поскольку режим новый и мало ли что случается, в памяти МК имеется защита от сбоев замеров, и хранится число самих замеров. Так же на всякий случай в ПО правки углов есть настройка "ручного" ввода угла второго(позднего) импульса. При "ручном" вводе МК не будет делать "автозамер" и не будет использовать ПЗУ.
Если изначально не хотите использовать второй(поздний) импульс, и не хотите автозамер, в ПО графиков, в ручной настройке углов нужно задать угол заведомо превышающий реальный график, например 100 градусов. При этом МК будет работать в точности по старой версии расчета, с одним импульсом.
Основные изменения в версии 2.0:
- два фронта импульса;
- автозамер второго импульса
- защита от помех импульса
- использование ПЗУ
Важно, на текущий момент нет системы распознавания первый/второй импульс, по текущей схеме PD2(INT0) - первый(ранний) импульс, PD3(INT1) - второй(поздний).

В данный момент схема прошла тестирование на осциллографе и стробостенде, а вот испытывать на мото сейчас холодно. Чуть позднее будет видео.
Эта погрешность расчета носит сугубо механический характер, вес поршневой группы, и моменты трения+инерция не позволяют раскрутить движок на старте, линейно и быстро. При чем с увеличением объема это сказывается сильнее. Например на двигателях 150сс и менее, этот "эффект" почти незаметен, а на 400сс он уже может травмировать.
В стоковых решениях с этой проблемой борются использованием обеих фронтов импульса магнитного датчика. Ранний импульс хорош для работы двигателя, а поздний отстает от него, на угол длинны металлического наплыва метки вала, и хорош для запуска.
Логика здесь простая, импульс запуска проходит после второго сигнала, но в связи с особенностями работы МК, пришлось изменить схему, а именно: ввести второй канал с оптроном. Включен второй РС817 с обратной полярностью, это обеспечивает приход сигналов на разные ноги МК.
По схеме, входы сигнала были изменены по двум причинам: использование хардварного прерывания захвата сигнала, и необходимостью освободить линии даты RXD/TXD для связи с ПК "онлайн". А вот выход сигнала не столь критичен, в ПО правки графиков теперь предусмотрена настройка пина выходного сигнала, поскольку в DIP и SMD удобность разводки отличается. Появился выход PB2, на нем происходит индикация работы МК по второму сигналу, проще говоря светодиод на нем светится, когда мотор заводится, и на низких оборотах. Еще есть РВ7 - выход управления flyback, отключает генерацию питания на момент искры, его работа показана в схеме от Altium. Этот пин не мешает процессу, в схеме где он не используется, можно просто повесить в воздухе. На PD0/PD1 планируется подключать связь к ПК, в беспроводном варианте переходника это довольно удобно. РС1 пока что остается за резистором/вакуумом, но код по нему не готов. По схемным изменением вроде все.
Программные изменения, тут все гораздо сложнее, совокупность правок довольно большая, код можно считать новой версией - 2.0, и он не совместим с ПО графиков старой версии, точно так же как ПО графиков не совместимо с файлами ранних версий. Но есть и хорошие новости, ФУОЗ версии 2.0 может нормально работать со старой платой(один импульс), правда ногу сигнала придется перекинуть по новой схеме, с PD0 на PD2.
В программе графиков как и раньше нужно задавать угол первого (раннего) импульса, а вол угол второго МК определит самостоятельно. Работает это так:
- заводим;
- держим обороты от 1200 до 1500;
- ждем 10 секунд.
Обычно МК достаточно 3-5 секунд для замера, ну максимум 10, результат фильтруется от ошибок и хранится в ПЗУ чипа. При последующих включениях он будет проверять ничего ли не изменилось, но уже при старте будет использоваться замеренная величина угла позднего импульса. При этом если схема старая, и импульс один, МК это распознает и понимает. Замеренный угол уже сейчас можно считать с EEPROM, например с eXtreme Burner. Поскольку режим новый и мало ли что случается, в памяти МК имеется защита от сбоев замеров, и хранится число самих замеров. Так же на всякий случай в ПО правки углов есть настройка "ручного" ввода угла второго(позднего) импульса. При "ручном" вводе МК не будет делать "автозамер" и не будет использовать ПЗУ.
Если изначально не хотите использовать второй(поздний) импульс, и не хотите автозамер, в ПО графиков, в ручной настройке углов нужно задать угол заведомо превышающий реальный график, например 100 градусов. При этом МК будет работать в точности по старой версии расчета, с одним импульсом.
Основные изменения в версии 2.0:
- два фронта импульса;
- автозамер второго импульса
- защита от помех импульса
- использование ПЗУ
Важно, на текущий момент нет системы распознавания первый/второй импульс, по текущей схеме PD2(INT0) - первый(ранний) импульс, PD3(INT1) - второй(поздний).

В данный момент схема прошла тестирование на осциллографе и стробостенде, а вот испытывать на мото сейчас холодно. Чуть позднее будет видео.
- Вложения
-
- CDI_v2.0.zip
- Исходники, ассемблер, AVR Studio 4.
- (155.87 KiB) Скачиваний: 227
-
- CDI_v2.0.part3.rar
- CDI версии 2.0, ПО графиков + .asm, кусок 3
- (249.3 KiB) Скачиваний: 219
-
- CDI_v2.0.part2.rar
- CDI версии 2.0, ПО графиков + .asm, кусок 2
- (1000 KiB) Скачиваний: 228
-
- CDI_v2.0.part1.rar
- CDI версии 2.0, ПО графиков + .asm, кусок 1
- (1000 KiB) Скачиваний: 233
Последний раз редактировалось Flash.#13 Вс фев 04, 2018 20:52:19, всего редактировалось 1 раз.
Re: ФУОЗ на базе AC-CDI
Вс фев 04, 2018 18:19:11
Уточняю: данная схема условно назьйваем v2.1, соответно прошивка v2.0 работает под нее (распиновка МК уже другая).
Вот схема и плата v2.1 в формате Altium Designer
Вот схема и плата v2.1 в формате Altium Designer
Re: ФУОЗ на базе AC-CDI
Пн фев 05, 2018 21:36:24
Flash.#13 привет, я не верю что это случилось  нас услышали, я и не думал что вообще будет версия с 2 импульсами, теперь можно смело заводить мотор не боясь получить травму))), я уже даже смирился и вырезал переходную пластину под датчик чтоб сместить его в позднюю сторону, но теперь как говорится заживем
нас услышали, я и не думал что вообще будет версия с 2 импульсами, теперь можно смело заводить мотор не боясь получить травму))), я уже даже смирился и вырезал переходную пластину под датчик чтоб сместить его в позднюю сторону, но теперь как говорится заживем  Выражаю ОГРОМНУЮ благодарность за проделанную работу
Выражаю ОГРОМНУЮ благодарность за проделанную работу
нас услышали, я и не думал что вообще будет версия с 2 импульсами, теперь можно смело заводить мотор не боясь получить травму))), я уже даже смирился и вырезал переходную пластину под датчик чтоб сместить его в позднюю сторону, но теперь как говорится заживем Выражаю ОГРОМНУЮ благодарность за проделанную работу Re: ФУОЗ на базе AC-CDI
Пн фев 05, 2018 22:49:44
Я очень настаивал про изпользование 2 импульса и пинал товарища Flash. Сейчас проект работает как положено, до сих пор не заметил глюки на моего стенда.
А у меня есть хороший стенд с длина лентьй 40 градуса и индуктивньй датчик 500 ома.

А у меня есть хороший стенд с длина лентьй 40 градуса и индуктивньй датчик 500 ома.

Последний раз редактировалось Altium Вт фев 06, 2018 19:04:37, всего редактировалось 2 раз(а).
Re: ФУОЗ на базе AC-CDI
Вт фев 06, 2018 10:29:23
Здравствуйте. Как выбирается резистор нагрузки по входу?
Re: ФУОЗ на базе AC-CDI
Вт фев 06, 2018 11:35:54
Бред. И полная х... Увел "єтот" ветку не в лес , а в болото...
Какие обороты мотора при пуске???
Изучайте теорию "Магнитное поле и электрический ток" и не будет отдачи не в ногу и не в мозг.
В старой версии столько глюков и куча возможностей доработки...
Ввели в программу "изменение портов выхода"... Ну...
Ну...
Какие обороты мотора при пуске???
Изучайте теорию "Магнитное поле и электрический ток" и не будет отдачи не в ногу и не в мозг.
В старой версии столько глюков и куча возможностей доработки...
Ввели в программу "изменение портов выхода"...
Re: ФУОЗ на базе AC-CDI
Вт фев 06, 2018 13:30:02
Iszak если сильно надо, оно делается Когда Altium дал нужные осциллограммы и пруфы зачем, и почему, работа была начата, и сделана, тут главное знать что происходит, и почему. На двигателях мелкого объема этот момент "остановки" малозаметен, поэтому долго думал что этого нет. Следующий этап - связь с ПК, при чем есть китайские дешевые РЧ модули, чтобы эта связь была "беспроводной". Это должно сильно упростить отладку.
alexhr больше вопрос к Altium, он его опробовал, и эффект есть. В идеале нужно смотреть осциллографом, но на старой версии его вообще не было, и все работало. Короче он нужен, но его номинал точно не определен. Суть там в создании нагрузки для датчика, эта нагрузка уменьшает напряжение импульсов, а ток "помех" слабее сигнала что дает магнит, но у "помех" больше напряжение поля, резистор это элемент фильтра-нагрузки.
asel ваше негодование неясно, схема стала лучше. Изменение портов выхода было просьбой Altium, потому что в SMD версии МК ноги отличаются. Само собой все кто знают как ноги менять в прошивке не парятся, но не все же знают. Кроме того текущая схема работает как с одиночным сигналом(старая плата), так и с двойным. Плюшек стало больше, при чем, без ущерба системе.
Постараюсь снять видео, чтобы показать наглядно насколько второй импульс улучшает работу ФУОЗ, если есть глюки, нужно не молчать, а писать какие именно, и они будут исправлены.
alexhr больше вопрос к Altium, он его опробовал, и эффект есть. В идеале нужно смотреть осциллографом, но на старой версии его вообще не было, и все работало. Короче он нужен, но его номинал точно не определен. Суть там в создании нагрузки для датчика, эта нагрузка уменьшает напряжение импульсов, а ток "помех" слабее сигнала что дает магнит, но у "помех" больше напряжение поля, резистор это элемент фильтра-нагрузки.
asel ваше негодование неясно, схема стала лучше. Изменение портов выхода было просьбой Altium, потому что в SMD версии МК ноги отличаются. Само собой все кто знают как ноги менять в прошивке не парятся, но не все же знают. Кроме того текущая схема работает как с одиночным сигналом(старая плата), так и с двойным. Плюшек стало больше, при чем, без ущерба системе.
Постараюсь снять видео, чтобы показать наглядно насколько второй импульс улучшает работу ФУОЗ, если есть глюки, нужно не молчать, а писать какие именно, и они будут исправлены.
Re: ФУОЗ на базе AC-CDI
Вт фев 06, 2018 14:27:12
Flash.#13
Меня интересует что вошло (типа плюшки), или что изменено из старой программы.
Второй импульс. для пуска, это полный БРЕД. Закон Фаредея в руки. Долго объяснять.
Насчет глюков.. я уже этот этап прошел. осциллограф все покажет. Увы, делаю и проверяю до тошноты.
Простой пример, протестируйте подпрограмму предсказания импульса дотошно. Где , куда, кто запомнил, и откуда потом идет задержка.
Второе - ослепление искры в районе импульса датчика....
И т.п. Мож в новой программе что-то поменяли?
Насчет компутера. Для тупого клиента-потребителя нужен простой пультик с тремя кнопками. Выбор № характеристики, выбор оборотов, +- изменение угла в этой точке. Монитор - примитивный цифровой ЛСД.
Меня интересует что вошло (типа плюшки), или что изменено из старой программы.
Второй импульс. для пуска, это полный БРЕД. Закон Фаредея в руки. Долго объяснять.
Насчет глюков.. я уже этот этап прошел. осциллограф все покажет. Увы, делаю и проверяю до тошноты.
Простой пример, протестируйте подпрограмму предсказания импульса дотошно. Где , куда, кто запомнил, и откуда потом идет задержка.
Второе - ослепление искры в районе импульса датчика....
И т.п. Мож в новой программе что-то поменяли?
Насчет компутера. Для тупого клиента-потребителя нужен простой пультик с тремя кнопками. Выбор № характеристики, выбор оборотов, +- изменение угла в этой точке. Монитор - примитивный цифровой ЛСД.
Re: ФУОЗ на базе AC-CDI
Вт фев 06, 2018 17:01:59
Второй импульс для пуска используется на всех стоковых решениях, это придумано не случайно, а бред или не бред, нужно спрашивать у тех кто пользуется. Люди пишут что отдача есть, а некоторые еще и фотки присылают. О глюках, за все время вы не выложили ни одного фото с объяснениями, мы не играем в "найди и угадай", нужно увидеть тоже самое у себя, чтобы потом исправить. Что вижу, исправляю, сидеть сверх-дотошно времени нет.
Ослепление в районе импульса датчика сейчас имеет зону задержки около 4 градусов, при наличии "шумов" путей как ее уменьшить не вижу. Но это никак не влияет на работу во время импульса и после него, только в режиме "предсказания", при том что этот режим 99% времени ненужен. Например у Сарумана его вовсе нет.
ПК в первую очередь нужен для настройки, любые сбои и глюки будут сразу видны, как работает датчик, что видит МК, все что происходит в расчете, как с авто-диагностикой. Так же круто править работу "на лету", вроде таких проектов мало.
Ослепление в районе импульса датчика сейчас имеет зону задержки около 4 градусов, при наличии "шумов" путей как ее уменьшить не вижу. Но это никак не влияет на работу во время импульса и после него, только в режиме "предсказания", при том что этот режим 99% времени ненужен. Например у Сарумана его вовсе нет.
ПК в первую очередь нужен для настройки, любые сбои и глюки будут сразу видны, как работает датчик, что видит МК, все что происходит в расчете, как с авто-диагностикой. Так же круто править работу "на лету", вроде таких проектов мало.