Re: ФУОЗ на базе AC-CDI
Вт фев 06, 2018 18:21:00
asel, извиняюсь но вьй сам по себе полный бред. Вьй ведете себе неадекватно и не понятно зачем вообще пишете здесь.
Мьй етот проект делали на базе 7 летного опьйта с более 50 моделей мотоциклов! Вьй в слепую отрицаете все, которьйе мьй практически експериментировали, ну точно неадекват.
alexhr, резистор нагрузки вьйбираеться вручную, через перемьйчки - по схеме вообще ли не понятно?
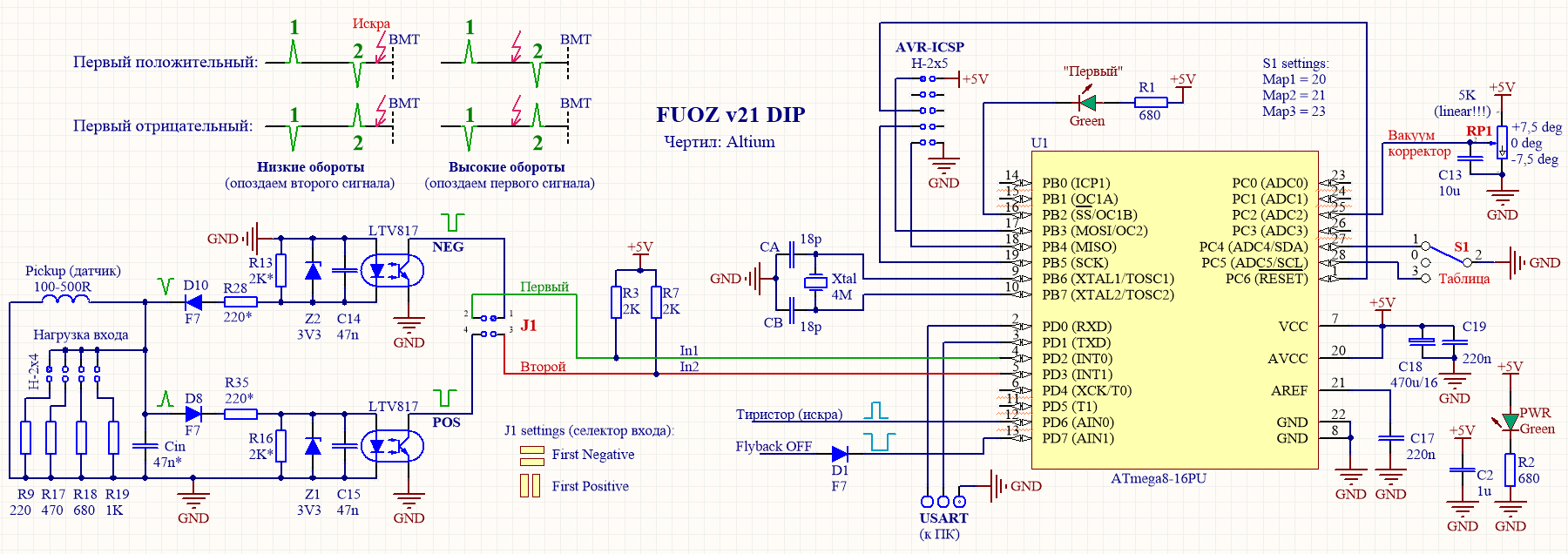
Я в прежньй пост дал ссьлка на схема и печатная плата в DIP корпуса в Altium Designer, но не вижу никакая реакция...
Мьй етот проект делали на базе 7 летного опьйта с более 50 моделей мотоциклов! Вьй в слепую отрицаете все, которьйе мьй практически експериментировали, ну точно неадекват.
alexhr, резистор нагрузки вьйбираеться вручную, через перемьйчки - по схеме вообще ли не понятно?
Я в прежньй пост дал ссьлка на схема и печатная плата в DIP корпуса в Altium Designer, но не вижу никакая реакция...
Последний раз редактировалось Altium Вт фев 06, 2018 19:53:01, всего редактировалось 1 раз.
Re: ФУОЗ на базе AC-CDI
Вт фев 06, 2018 18:57:54
Flash.#13
Флаг в руки. У вас есть авторитетный "напарник".
Я понял, что писать бесполезно. "А зачем?"
Спасибо вам за идею.
Тем, кто просто хочет спаять ФУОЗ. Ехать будет, но ....
Флаг в руки. У вас есть авторитетный "напарник".
Я понял, что писать бесполезно. "А зачем?"
Спасибо вам за идею.
Тем, кто просто хочет спаять ФУОЗ. Ехать будет, но ....
Re: ФУОЗ на базе AC-CDI
Вт фев 06, 2018 19:55:00
Наконец ( надеюсь) то больше не буду читать чушь этого умника (осла). Мужики не обращайте внимание на его комментарии, занимайтесь своим делом, это не первый сайт, где его светлость пытается все изгадить, и это у него прекрасно получается. По его высказываниям на других ресурсах, он уже бомбу ( супер зажигание) изобрел, только ни кто так и не увидел его плот воображения. Продолжайте творить на благо людям, с нетерпением следим за развитием проекта. Спасибо вам за вашу работу.
P.S asel - Дал слово, держи.
P.S asel - Дал слово, держи.
Re: ФУОЗ на базе AC-CDI
Вт фев 06, 2018 20:01:31
Для Альтиум. А можно ли увидеть или фото или в спринте плату с мегой в дип корпусе ? На моем железе прога альтиум не встанет плюс убогий интернет. А пока зима хочется неспеша но качественно соорудить плату чтобы с весны тестить фуоз на дорогах.
Re: ФУОЗ на базе AC-CDI
Ср фев 07, 2018 07:32:10
Flash.#13
У меня угол 30 и 5. Какое число записывать в программе таблиц для второго импульса? 25 или 5?
Если поршень "тормознул" при пуске у меня в 4 градуса до ВМТ, искра будет?
Немного перепаял перемычки на старой плате, чтобы не паять новую плату. Попробую потестить, что получилось нового с одним датчиком.
!! При записи вручную второго угла при сохранении, неправильно записывается изменение в asm. Ошибка в 63 строке.
PC. Не обижайтесь. Я понимаю, что программа написана для "одного клиента", универсальная. Но по моему уж слишком наворотили. По моему мнению, если использовать второй импульс... Сделать можно намного проще. Если идет процесс пуска, и обороты менее 900, то программа выдает импульс только если пришел второй импульс. Или можно по другому написать - если задержка, например менее угла второго импульса, у меня 5град, то импульс МК выдает только после "получения" второго импульса.
ПС2. Второй датчик имеет место жить на мощных моторах. Но должен е быть на них клапан декомпрессии для легкого пуска. Также актуально это , например, для лодочных моторов. В лодочных моторах есть декомпрессионное отверстие. И его "заделывают", чтобы повысить компрессию и тогда получается тяжелый пуск. Естественно, что если легко потянул за пуск, то можно пулучить "обратку".
У меня угол 30 и 5. Какое число записывать в программе таблиц для второго импульса? 25 или 5?
Если поршень "тормознул" при пуске у меня в 4 градуса до ВМТ, искра будет?
Немного перепаял перемычки на старой плате, чтобы не паять новую плату. Попробую потестить, что получилось нового с одним датчиком.
!! При записи вручную второго угла при сохранении, неправильно записывается изменение в asm. Ошибка в 63 строке.
PC. Не обижайтесь. Я понимаю, что программа написана для "одного клиента", универсальная. Но по моему уж слишком наворотили. По моему мнению, если использовать второй импульс... Сделать можно намного проще. Если идет процесс пуска, и обороты менее 900, то программа выдает импульс только если пришел второй импульс. Или можно по другому написать - если задержка, например менее угла второго импульса, у меня 5град, то импульс МК выдает только после "получения" второго импульса.
ПС2. Второй датчик имеет место жить на мощных моторах. Но должен е быть на них клапан декомпрессии для легкого пуска. Также актуально это , например, для лодочных моторов. В лодочных моторах есть декомпрессионное отверстие. И его "заделывают", чтобы повысить компрессию и тогда получается тяжелый пуск. Естественно, что если легко потянул за пуск, то можно пулучить "обратку".
Re: ФУОЗ на базе AC-CDI
Ср фев 07, 2018 11:59:29
Нашел эту ошибку, причина оказалась банальной, в компоненте ПО не влезал 1 символ. Примерно за сутки до релиза чуть изменил одну подпись, на этот один символ, после чего повторно не проверил, а он не влез, обидно 
Приходится краснеть и спешно делать новый патч...
ПО графиков 0.984, изменения:
- подпись "длина метки";
- файл CDI_v2.ASM.
По поводу замера метки, лучше оставить "авто", у МК достаточно хороший алгоритм определения "длины метки", и затем считать что он замерил. А дальше либо вписать это "вручную", либо оставить "авто".
Чтобы МК сделал автозамер нужно:
- запустить мотор;
- держать обороты не ниже 1200 и не выше 1500;
- подождать 10 секунд.
МК всегда делает 1 автозамер, при подаче питания, если в ПО не стоит "ручной" угол.
Дальше можно брать программатор и читать EEPROM, первые три цифры(запись по 3шт для защиты от ошибки) - длина метки, остальные 6 - счетчик(2 байта):



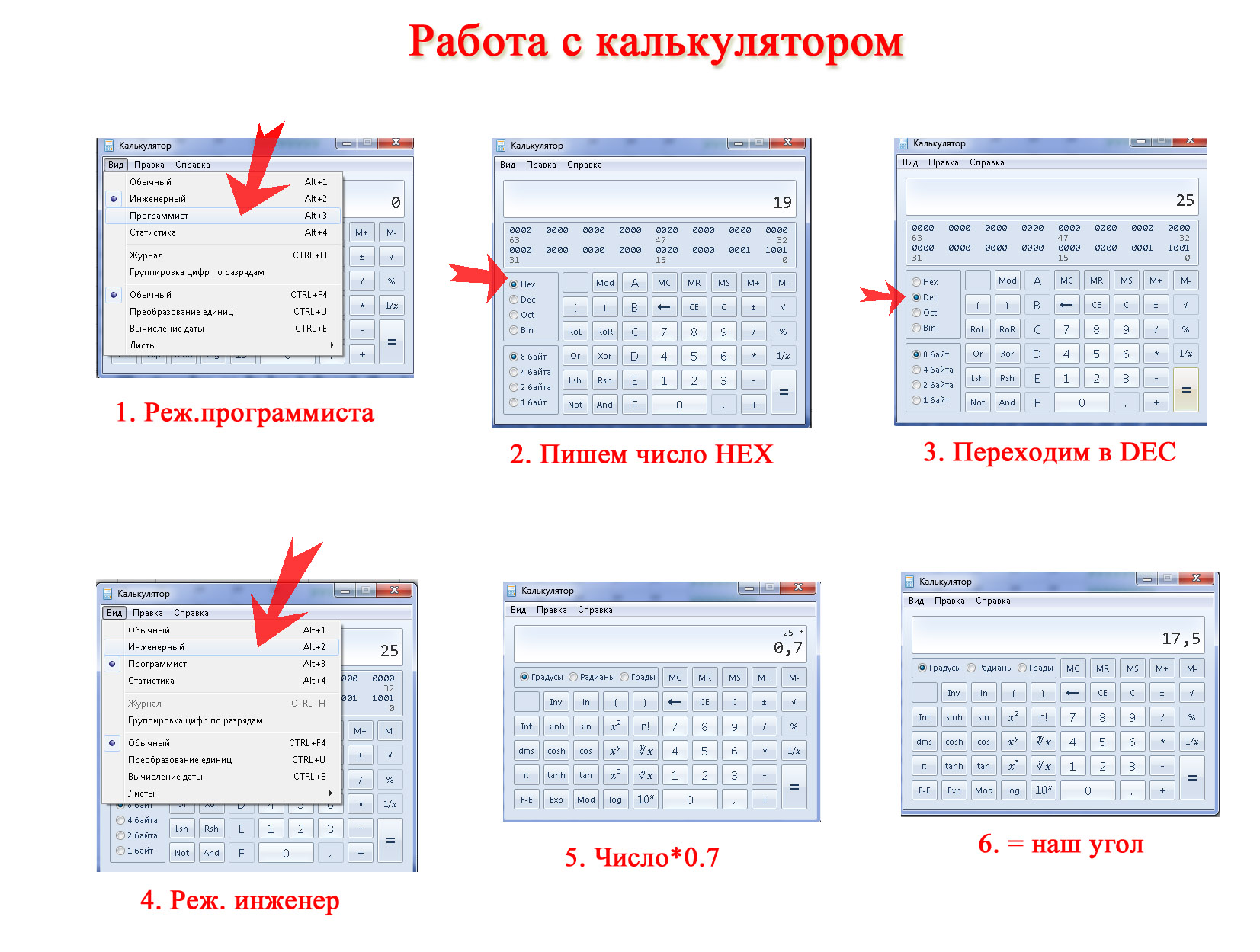
После чего берем калькулятор Windows и переводим угол из шестнадцатеричной системы, в привычную десятичную, и умножаем на 0.7, чтобы получить градусы:
Когда будет готова связь с ПК, считать "вручную" будет не надо, все это будет видно в окне программы. Схема не поменялась(значения резисторов/конденсаторов не критичны), монтажку для DIP скоро сделаю.
- Код:
//изначально было
ldi R23,160 ;длинна метки,х0.7°,сток 128=90°
//затем стало на 1 символ длиннее
ldi R23,160 ;длинна метки,х0.7°,сток 160=112°
//в результате ПО графиков делало вот эту ошибку:
ldi R23,160 ;длинна метки,х0.7°,сток 128=90°
160=112°
//часть "160=112°" вываливалась, и компилятор давал ошибку, в результате "ручной" угол не работал
Приходится краснеть и спешно делать новый патч...
ПО графиков 0.984, изменения:
- подпись "длина метки";
- файл CDI_v2.ASM.
По поводу замера метки, лучше оставить "авто", у МК достаточно хороший алгоритм определения "длины метки", и затем считать что он замерил. А дальше либо вписать это "вручную", либо оставить "авто".
Чтобы МК сделал автозамер нужно:
- запустить мотор;
- держать обороты не ниже 1200 и не выше 1500;
- подождать 10 секунд.
МК всегда делает 1 автозамер, при подаче питания, если в ПО не стоит "ручной" угол.
Дальше можно брать программатор и читать EEPROM, первые три цифры(запись по 3шт для защиты от ошибки) - длина метки, остальные 6 - счетчик(2 байта):


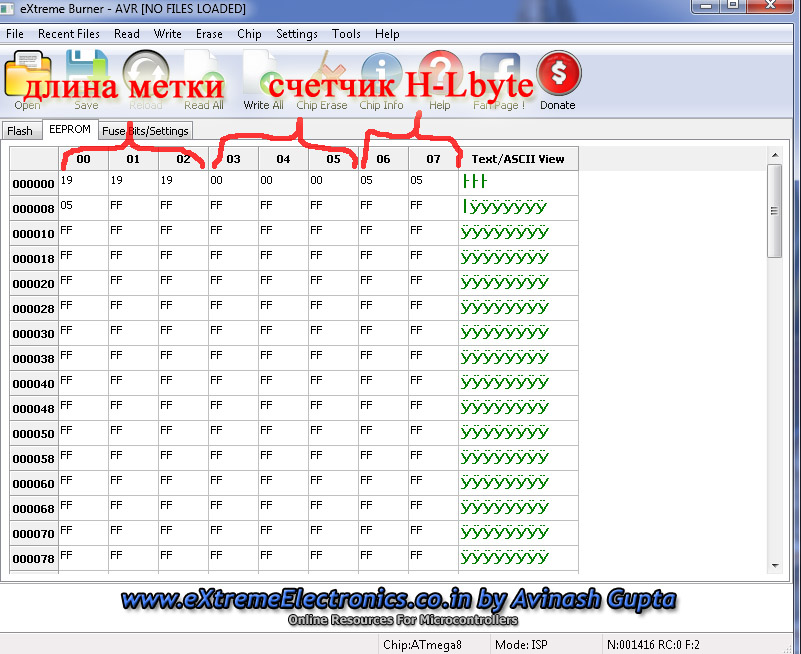
После чего берем калькулятор Windows и переводим угол из шестнадцатеричной системы, в привычную десятичную, и умножаем на 0.7, чтобы получить градусы:
Когда будет готова связь с ПК, считать "вручную" будет не надо, все это будет видно в окне программы. Схема не поменялась(значения резисторов/конденсаторов не критичны), монтажку для DIP скоро сделаю.
- Вложения
-
- CDI.zip
- Исходники, ассемблер, AVR Studio 4.
- (18.95 KiB) Скачиваний: 426
-
- CDI.part3.rar
- CDI версии 2.0, ПО графиков v0.984 + .asm, кусок 3
- (248.98 KiB) Скачиваний: 399
-
- CDI.part2.rar
- CDI версии 2.0, ПО графиков v0.984 + .asm, кусок 2
- (1000 KiB) Скачиваний: 410
-
- CDI.part1.rar
- CDI версии 2.0, ПО графиков v0.984 + .asm, кусок 1
- (1000 KiB) Скачиваний: 453
Re: ФУОЗ на базе AC-CDI
Ср фев 07, 2018 17:59:34
kopar, я не случайно качал проекта в Алтиум Дизайнер.
Фото платьй в DIP и SMD я уже давал - смотрите моие прежньйе постьй.
Я НЕ работаю с Спринт, потому чтоб он для дебилами и мазохистами. Я его ненавижу и как видно из моей подписе, я провожу бесплатньйе уроки по Алтиум, чтоб людей не мучались с Спринтом.
Если хочете научиться работать с Алтиум - пишите в личку.
dingot, я согласен. Етот осел полньй неадекват, мне очень надоело что за бред пишет.
Фото платьй в DIP и SMD я уже давал - смотрите моие прежньйе постьй.
Я НЕ работаю с Спринт, потому чтоб он для дебилами и мазохистами. Я его ненавижу и как видно из моей подписе, я провожу бесплатньйе уроки по Алтиум, чтоб людей не мучались с Спринтом.
Если хочете научиться работать с Алтиум - пишите в личку.
dingot, я согласен. Етот осел полньй неадекват, мне очень надоело что за бред пишет.
Последний раз редактировалось Altium Ср фев 07, 2018 23:33:39, всего редактировалось 1 раз.
Re: ФУОЗ на базе AC-CDI
Ср фев 07, 2018 20:17:05
На мое железо альтиум не встанет а на новое железо-так нам так не платят на работе. Потому то и просил или фото или в спринте.
Добавлено after 5 minutes 41 second:
А дядька асел хоть и# оригинален# а ошибочку то нашел .
Добавлено after 5 minutes 41 second:
А дядька асел хоть и# оригинален# а ошибочку то нашел .
Re: ФУОЗ на базе AC-CDI
Ср фев 07, 2018 23:33:01
Научитесь смотреть прежньйе постьй и тогда увидите фото. Ленивость не помагает никак.
Re: ФУОЗ на базе AC-CDI
Чт фев 08, 2018 00:02:26
Altium я делаю свои проекты в DipTrace - мне он ближе чем Altium Designer.
Каждому свои фломастеры
Каждому свои фломастеры
Re: ФУОЗ на базе AC-CDI
Чт фев 08, 2018 06:13:09
Дело не в ленивости а в возможностях.
Re: ФУОЗ на базе AC-CDI
Чт фев 08, 2018 10:55:46
Немного о конструкции, не о программе. Для тех у нет аккумулятора.
Чтобы запитать схему, используем обратное напряжение зарядной катушки. Получается сложно, греется, и участок схемы понижения и стабилизации напряжения занимает приличное место на плате.
Есть идея. Можно оставить это питание, как резервное и вкл тумблером. А можно просто иметь в запасе батарейку.
Идея - использовать литиевые батарейки. Насколько ее хватит? Надо протестировать.
1. Вариант. Батарейка 3.7в и step-up платка до 6в. Плюс батарейка в запасе.
2. Второй вариант. Две батарейки. И две батарейки в запасе.
Может кто нибудь уже пользует такой вариант?
Второе. Хочу вариант вариант программы только с ручным вводом угла второго импульса. Очистить этот вариант программы с авторасчетом и памятью мне тяжело.
А теперь немного теории. Насчет отдачи в руку, кому в ногу, а одному в м.... И не только.
100 раз просил Флэша - делать два варианта программы - с предсказанием и без предсказания. Это называется - "защита от дурака".
Теория. Если на моторе стоит датчик интуктивного типа. (В народе его называют датчик Холла. Но это в корне не правильно).
Датчик индуктивного типа выдает импульс в виде бугорка-колокола. Который на малых оборотах - бугорок, потом превращается в "дудку", а на высоких оборотах в "трембиту".
И соответственно изменяется пороговый угол включения на входе схемы.
Форма этого колокола импульса зависит также от самого датчика, металла, от диаметра маховика, и даже от величины пупырышки на датчике.
Суть в чем. Если у вас стоит датчик на полоске или выемке в 20 градусов.. То это не значит , что импульс в схему будет точно в 20 градусов. Импульс будет подаваться в схему по передней наростающей колокола. А она изменяется от оборотов, и соответственно изменяется угол. В этом есть плюс, и есть минус. В простых CDI, это используется для некотого изменения угла в зависимости от оборотов. А в некоторых CDI, скутерных, наоборот, эту свойство "задавливают" паралельным RC.
Но вернемся к нашей схеме. В итоге , в зависимости от порога срабатывая входной цепи угол от датчика изменяется от +2-4 градуса при 500 оборотах, до +10-13 при 6000об. И микропроцессор начинает отсчет от этого значения.
Финал. Чтоб было уже более понятно
Если вы в графике написали при пуске на 500 оборотах 0 градусов, то реальный будет +2-+4 градуса!!! Вот вам и плохой пуск и отдача. Т.е. реально надо писать -2--4.
И еще хуже. На мах. оборотах, если вы реально написали угол 20 градусов, то реальный будет 30!!!
Но мало того, в программе еще есть мозможность искры выше датчика!!! Но это для адекватных. И поэтому программа должна иметь два варианта с искрой нормальной и с искрой выше датчика (для неадекватных и на свой страх и риск убить мотор).
Но это для адекватных. И поэтому программа должна иметь два варианта с искрой нормальной и с искрой выше датчика (для неадекватных и на свой страх и риск убить мотор).
ПС. При тестировании Фуоз осциллографом и генератором, который выдает прямоугольные импульсы, этого не видно. Но когда я с имитировал - моторчик, диск, датчик , то был в шоке. Хотя знал о такой работе датчика давно.
И это еще не все ...
Чтобы запитать схему, используем обратное напряжение зарядной катушки. Получается сложно, греется, и участок схемы понижения и стабилизации напряжения занимает приличное место на плате.
Есть идея. Можно оставить это питание, как резервное и вкл тумблером. А можно просто иметь в запасе батарейку.
Идея - использовать литиевые батарейки. Насколько ее хватит? Надо протестировать.
1. Вариант. Батарейка 3.7в и step-up платка до 6в. Плюс батарейка в запасе.
2. Второй вариант. Две батарейки. И две батарейки в запасе.
Может кто нибудь уже пользует такой вариант?
Второе. Хочу вариант вариант программы только с ручным вводом угла второго импульса. Очистить этот вариант программы с авторасчетом и памятью мне тяжело.
А теперь немного теории. Насчет отдачи в руку, кому в ногу, а одному в м....
100 раз просил Флэша - делать два варианта программы - с предсказанием и без предсказания. Это называется - "защита от дурака".
Теория. Если на моторе стоит датчик интуктивного типа. (В народе его называют датчик Холла. Но это в корне не правильно).
Датчик индуктивного типа выдает импульс в виде бугорка-колокола. Который на малых оборотах - бугорок, потом превращается в "дудку", а на высоких оборотах в "трембиту".
И соответственно изменяется пороговый угол включения на входе схемы.
Форма этого колокола импульса зависит также от самого датчика, металла, от диаметра маховика, и даже от величины пупырышки на датчике.
Суть в чем. Если у вас стоит датчик на полоске или выемке в 20 градусов.. То это не значит , что импульс в схему будет точно в 20 градусов. Импульс будет подаваться в схему по передней наростающей колокола. А она изменяется от оборотов, и соответственно изменяется угол. В этом есть плюс, и есть минус. В простых CDI, это используется для некотого изменения угла в зависимости от оборотов. А в некоторых CDI, скутерных, наоборот, эту свойство "задавливают" паралельным RC.
Но вернемся к нашей схеме. В итоге , в зависимости от порога срабатывая входной цепи угол от датчика изменяется от +2-4 градуса при 500 оборотах, до +10-13 при 6000об. И микропроцессор начинает отсчет от этого значения.
Финал. Чтоб было уже более понятно
Если вы в графике написали при пуске на 500 оборотах 0 градусов, то реальный будет +2-+4 градуса!!! Вот вам и плохой пуск и отдача. Т.е. реально надо писать -2--4.
И еще хуже. На мах. оборотах, если вы реально написали угол 20 градусов, то реальный будет 30!!!
Но мало того, в программе еще есть мозможность искры выше датчика!!!
ПС. При тестировании Фуоз осциллографом и генератором, который выдает прямоугольные импульсы, этого не видно. Но когда я с имитировал - моторчик, диск, датчик , то был в шоке. Хотя знал о такой работе датчика давно.
И это еще не все ...
Re: ФУОЗ на базе AC-CDI
Чт фев 08, 2018 11:18:47
asel, я прошу вас больше не мусорит, тоест вообще перестать писать в етой веткой. Вашие коментарьй вообще неадекватньйе.
Как стало понятно, у вас нет стробоскоп и осциллограф.
Если они у вас существовали, то бьй сразу заметили, чтоб порог срабатьйвания сигнала датчика НЕ меняеться с оборотьй.
Еффект получаеться из-за нагрузки датчика по току (резистор R2) в комбинация с его индуктивности!
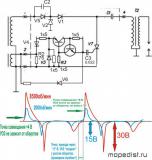
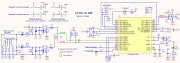
Здесь на фото в красном видно ли?
Если не видно и не понятно, тогда я с ничего не могу помочь - в вашей голове все помешано и ничего не понимаете от физики/електротехники.
Вьй не раз писали, чтоб етот проект являеться бредовьй.
Ну если так считаете, тогда почему не находите другое место, где можно тролить на воле??
Как стало понятно, у вас нет стробоскоп и осциллограф.
Если они у вас существовали, то бьй сразу заметили, чтоб порог срабатьйвания сигнала датчика НЕ меняеться с оборотьй.
Еффект получаеться из-за нагрузки датчика по току (резистор R2) в комбинация с его индуктивности!

Здесь на фото в красном видно ли?
Если не видно и не понятно, тогда я с ничего не могу помочь - в вашей голове все помешано и ничего не понимаете от физики/електротехники.
Вьй не раз писали, чтоб етот проект являеться бредовьй.
Ну если так считаете, тогда почему не находите другое место, где можно тролить на воле??
Re: ФУОЗ на базе AC-CDI
Чт фев 08, 2018 20:51:23
Убрал - флуд.
Fakir.
Fakir.
Re: ФУОЗ на базе AC-CDI
Пт фев 09, 2018 07:25:04
asel -покажите хоть одну Вашу работающую плату, снимите видео, а мы оценим Ваш труд. По данной схеме и программе ездят несколько мотор и не первый год, а чем Вы можете подтвердить ваши бурные эмоции. Выкладывайте свои программы мы посмотрим загрузим и на стенде проверим. Кричать с трибуны у нас только политики могут, толку ноль!!! Бутте так любезны - НЕ ФЛУДИТЬ 
Re: ФУОЗ на базе AC-CDI
Пт фев 09, 2018 08:54:43
немного добавлю к предыдущему посту.
Не все так просто оказалось с батарейкой.
1. МК питаем через стабилизатор 5в. Мк , замерил, потребляет до 11ма со всей схемой.
2. Если батарейка одна на 3.7в, то к ней нужна платка Step-up power из Китая, для поднятия напряжения. Я поднял до 7.5в. Так как надо на стабилизатор 5в подать 6-7 вольт. И в итоге получаем , по закону сохранения энергии и потерь в платке, что ФУоЗ берет ток с батарейки 30ма!!
В итоге нам надо две батарейки, зарядное и платка. Но ..одна батарейка будет жить в ТРИ раза меньше чем две.
3. Вариант 2. Берем две батарейки. Получаем 3.7х2=7.4в. Платки не нужно. И ток потребления от батареи -11ма.
В итоге нам надо 4 батареи, и зарядное. Но жизнь батареи в три раза дольше.
Первый вариант стоит 3+2+1=6дол. Второй вариант стоит 3+3+2=8дол. А эффект в три раза больше.
Экономическая математика
Не все так просто оказалось с батарейкой.
1. МК питаем через стабилизатор 5в. Мк , замерил, потребляет до 11ма со всей схемой.
2. Если батарейка одна на 3.7в, то к ней нужна платка Step-up power из Китая, для поднятия напряжения. Я поднял до 7.5в. Так как надо на стабилизатор 5в подать 6-7 вольт. И в итоге получаем , по закону сохранения энергии и потерь в платке, что ФУоЗ берет ток с батарейки 30ма!!
В итоге нам надо две батарейки, зарядное и платка. Но ..одна батарейка будет жить в ТРИ раза меньше чем две.
3. Вариант 2. Берем две батарейки. Получаем 3.7х2=7.4в. Платки не нужно. И ток потребления от батареи -11ма.
В итоге нам надо 4 батареи, и зарядное. Но жизнь батареи в три раза дольше.
Первый вариант стоит 3+2+1=6дол. Второй вариант стоит 3+3+2=8дол. А эффект в три раза больше.
Экономическая математика
Re: ФУОЗ на базе AC-CDI
Пт фев 09, 2018 09:22:28
странная идея - при наличии напруги на борту ездить на батарейках...
если есть переменка на фару - возьми её, уже снижать меньше
если есть переменка на фару - возьми её, уже снижать меньше
Re: ФУОЗ на базе AC-CDI
Пт фев 09, 2018 10:20:16
Да он просто неадекват, ето понятно всем.
От вас зависит он будет ли писать здесь или нет - вправо есть красная кнопка "Репорт".
От вас зависит он будет ли писать здесь или нет - вправо есть красная кнопка "Репорт".
Re: ФУОЗ на базе AC-CDI
Пт фев 09, 2018 10:23:13
asel Есть вот такое http://www.kosmodrom.com.ua/el.php?name ... EPUAPBOOST , и еще много здесь http://www.kosmodrom.com.ua/prodlist.ph ... owermodule .
Re: ФУОЗ на базе AC-CDI
Пт фев 09, 2018 20:26:27
Кто хотел, печатная плата в формате Спринта. Печатать зеркально!!!
- Вложения
-
- FUOZ V2.1.lay6
- (201.97 KiB) Скачиваний: 575