Re: Таймеры/счётчики в AVR
Ср ноя 08, 2017 06:24:36
viiv, Спасибо за правки.
По поводу CurrentFlag функция включения планируется использоваться если CurrentFlag изначально имеет флаг FALSE.
И Соответственно как видно в теле функции она будет возвращать CurrentFlag до тех пор пока не выполниться условия (TimerToStart>=TimeVar)
Добавлено after 2 minutes 2 seconds:
А по поводу 4294967295UL то есть если к нему прибавить +1, он как я понял обнулится ?
Добавлено after 6 minutes 26 seconds:
Столкнулся только с одной проблемой при испытаниях кода переменная TIMER.MS была == uint16_t.
Если зафиксируем время допустим в 65530 TIMER.MS а TimeVar установим больше 5 то TIMER.MS обнулялся раньше чем выполниться условия (TimerToSTOP >= TimeVar) и соответственно происходил сбой в работе.
Добавлено after 28 minutes 25 seconds:
Как я понимаю надо делать проверку на подобие ((MAX_UINT32-TIMER.Channel[Number].TimeCountingON)>TimeVar) и если она не выполнилась использовать еще одну переменную для подсчета ?
Добавлено after 6 minutes 12 seconds:
Без доп переменной пришла такая идея, правда не знаю насколько она правильная.
Код:
По поводу CurrentFlag функция включения планируется использоваться если CurrentFlag изначально имеет флаг FALSE.
И Соответственно как видно в теле функции она будет возвращать CurrentFlag до тех пор пока не выполниться условия (TimerToStart>=TimeVar)
Добавлено after 2 minutes 2 seconds:
А по поводу 4294967295UL то есть если к нему прибавить +1, он как я понял обнулится ?
Добавлено after 6 minutes 26 seconds:
Столкнулся только с одной проблемой при испытаниях кода переменная TIMER.MS была == uint16_t.
Если зафиксируем время допустим в 65530 TIMER.MS а TimeVar установим больше 5 то TIMER.MS обнулялся раньше чем выполниться условия (TimerToSTOP >= TimeVar) и соответственно происходил сбой в работе.
Добавлено after 28 minutes 25 seconds:
Как я понимаю надо делать проверку на подобие ((MAX_UINT32-TIMER.Channel[Number].TimeCountingON)>TimeVar) и если она не выполнилась использовать еще одну переменную для подсчета ?
Добавлено after 6 minutes 12 seconds:
Без доп переменной пришла такая идея, правда не знаю насколько она правильная.
Код:
- Код:
uint8_t OnAfterTimeMS(uint32_t TimeVar,uint8_t Number,uint8_t CurrentFlag)
{
cli();
uint8_t OutFlag=0; //Переменная отвечает за RETURN f().
TIMER.TimeCurrent=TIMER.MS; //Присваиваем текущие значение МС
if (TIMER.Channel[Number].FlagTimersON==0) //Условия для захвата времени вызова функции и установки флага работы
{
TIMER.Channel[Number].TimeCountingON=TIMER.MS;
TIMER.Channel[Number].FlagTimersON=1;
}
uint32_t TimerToStart = TIMER.TimeCurrent-TIMER.Channel[Number].TimeCountingON;
if ((TimerToStart >= TimeVar)&((MAX_UINT32-TIMER.Channel[Number].TimeCountingON)>TimeVar)) //Если время до старта == TimeVar, то OutFlag=1 и обнуляем Флаг работы.
{
OutFlag=1;
TIMER.Channel[Number].FlagTimersON=0;
TIMER.TimeCurrent=0;
TIMER.Channel[Number].TimeCountingON=0;
TimerToStart=0;
}
else
{
OutFlag=CurrentFlag;
if (((MAX_UINT32-TIMER.Channel[Number].TimeCountingON)<TimeVar))
{
TIMER.MS=0;
TIMER.Channel[Number].TimeCountingON=0;
}
}
sei();
return OutFlag;
}
Re: Таймеры/счётчики в AVR
Ср ноя 08, 2017 06:52:50
Это происходит потому что условие проверок надо делать в прерывании ISR (TIMER0_OVF_vect). Тогда условие будет контролировать каждый тик таймера.7seg писал(а):Столкнулся только с одной проблемой при испытаниях кода переменная TIMER.MS была == uint16_t.
Если зафиксируем время допустим в 65530 TIMER.MS а TimeVar установим больше 5 то TIMER.MS обнулялся раньше чем выполниться условия (TimerToSTOP >= TimeVar) и соответственно происходил сбой в работе.
А в основном цикле проверять флаги работы таймера.
К примеру так
Спойлер
- Код:
ISR (TIMER0_OVF_vect)
{
uint8_t Number=0;
TCNT0=0x83; //значение для T0_0VF переполнения 1 раз в MS
TIMER.MS++; //Подсчет MS
for (Number=0;Number<AMOUNT_TIMERS;Number++) {
if ((TIMER.Channel[Number].TimeCountingON == TIMER.MS) && (TIMER.Channel[Number].FlagTimersOFF==0)) {
TIMER.Channel[Number].FlagTimersON = 1;
}
if ((TIMER.Channel[Number].TimeCountingOFF == TIMER.MS) && (TIMER.Channel[Number].FlagTimersON==1)) {
TIMER.Channel[Number].FlagTimersOFF = 1;
TIMER.Channel[Number].FlagTimersON = 0;
}
}
}
Спойлер
- Код:
if (TIMER.Channel[0].FlagTimersON == 1) {
PORTC |= (1<<1);
} else PORTC &= ~(1<<1);
if (TIMER.Channel[1].FlagTimersON == 1) {
PORTC |= (1<<2);
} else PORTC &= ~(1<<2);
if (TIMER.Channel[2].FlagTimersON == 1) {
PORTC |= (1<<3);
} else PORTC &= ~(1<<3);
Re: Таймеры/счётчики в AVR
Ср ноя 08, 2017 08:58:57
На самом деле при использование uint32_t это незначительно.
Есть вот такой код в функции Algoritm(); которая вызывается в цикле while();
Соответственно он работает не совсем правильно каждый момент включения на 100ms увеличиваеться еще на 100ms
т.е 100/200/300 итд.
При использование кода:
Все работает как и задумывалось включение каждые 1300ms на 100ms.
Как думаете Можно ли поправить функции ON/OFF Чтобы избавиться от дополнительных проверок вне функции ?.
Код:
Есть вот такой код в функции Algoritm(); которая вызывается в цикле while();
- Код:
R01TOP=OnAfterTimeMS(1200,1,R01TOP);
R01TOP=OFFAfterTimeMS(1300,2,R01TOP);
Соответственно он работает не совсем правильно каждый момент включения на 100ms увеличиваеться еще на 100ms
т.е 100/200/300 итд.
При использование кода:
- Код:
void Algoritm()
{
if (R01TOP==0)
{
R01TOP=OnAfterTimeMS(1200,1,R01TOP);
}
R01TOP=OFFAfterTimeMS(1300,2,R01TOP);
}
Все работает как и задумывалось включение каждые 1300ms на 100ms.
Как думаете Можно ли поправить функции ON/OFF Чтобы избавиться от дополнительных проверок вне функции ?.
Код:
Спойлер
- Код:
#define F_CPU 8000000UL
#include <util/delay.h>
#include <avr/interrupt.h>
#include <avr/io.h>
#include <avr/pgmspace.h>
#include <avr/eeprom.h>
#define SPI_PORT PORTB
#define SPI_DDR DDRB
#define SPI_MISO PB4
#define SPI_MOSI PB3
#define SPI_SCK PB5
#define SPI_SS PB2
struct UnionBits
{
unsigned DO0: 1;
unsigned DO1: 1;
unsigned DO2: 1;
unsigned DO3: 1;
unsigned DO4: 1;
unsigned DO5: 1;
unsigned DO6: 1;
unsigned DO7: 1;
};
union Byte {
uint8_t ByteRegister;
struct UnionBits Register;
};
union Byte OneOUT;
union Byte TwoOUT;
union Byte ThreeOUT;
union Byte OneIN;
union Byte TwoIN;
union Byte ThreeIN;
union Byte FourIN;
union Byte FifthIN;
#define AMOUNT_TIMERS 6 //Количество используемых таймеров
typedef struct
{
uint8_t FlagTimersON; //Флаг работы таймера
uint8_t FlagTimersOFF;
volatile uint32_t TimeCountingON; //Переменная фиксирующая время старта
volatile uint32_t TimeCountingOFF;
}TimerStruct;
typedef struct
{
TimerStruct Channel[AMOUNT_TIMERS];
volatile uint32_t MS;
volatile uint32_t TimeCurrent; //Текущие время
}SoftTimers;
SoftTimers TIMER;
/*Функция инициализации таймеров (установка всех значений в 0 )*/
void InitTimers()
{
TIMER.TimeCurrent=0;
TIMER.MS=0;
for(uint8_t i=0;i<AMOUNT_TIMERS;i++)
{
TIMER.Channel[i].FlagTimersON=0;
TIMER.Channel[i].FlagTimersOFF=0;
TIMER.Channel[i].TimeCountingON=0;
}
}
#define MAX_UINT32 4294967295UL
ISR (TIMER0_OVF_vect)
{
TCNT0=131; //значение для T0_0VF переполнения 1 раз в MS
TIMER.MS++; //Подсчет MS
if (TIMER.MS == MAX_UINT32)
{
TIMER.MS=0;
}
}
/*Функция вернет TRUE через время TimeVar,Иначе возвращает CurrentFlag */
uint8_t OnAfterTimeMS(uint32_t TimeVar,uint8_t Number,uint8_t CurrentFlag)
{
cli();
uint8_t OutFlag=CurrentFlag; //Переменная отвечает за RETURN f().
TIMER.TimeCurrent=TIMER.MS; //Присваиваем текущие значение МС
if (TIMER.Channel[Number].FlagTimersON==0) //Условия для захвата времени вызова функции, и установки флага работы
{
TIMER.Channel[Number].TimeCountingON=TIMER.MS;
TIMER.Channel[Number].FlagTimersON=1;
}
volatile uint32_t TimerToStart = TIMER.TimeCurrent-TIMER.Channel[Number].TimeCountingON;
//Если (время до старта == TimeVar) и (условия по переполнению MAX_UINT32 выполняеться),
//то OutFlag=1 и обнуляем Флаг работы
if ((TimerToStart >= TimeVar)&&((MAX_UINT32-TIMER.Channel[Number].TimeCountingON)>TimeVar))
{
OutFlag=1;
TIMER.Channel[Number].FlagTimersON=0;
TIMER.Channel[Number].TimeCountingON=0;
TimerToStart=0;
}
else
{
OutFlag=CurrentFlag;
//Если MAX_UINT32 переполниться быстрей чем досчитает TimeVar то обнулим таймер
if (((MAX_UINT32-TIMER.Channel[Number].TimeCountingON)<TimeVar))
{
TIMER.MS=0;
TIMER.Channel[Number].TimeCountingON=0;
}
}
sei();
return OutFlag;
}
uint8_t OFFAfterTimeMS(uint32_t TimeVar,uint8_t Number,uint8_t CurrentFlag)
{
cli();
uint8_t OutFlag=CurrentFlag; //Переменная отвечает за RETURN f().
TIMER.TimeCurrent=TIMER.MS; //Присваиваем текущие значение МС
if (TIMER.Channel[Number].FlagTimersOFF==0) //Условия для захвата времени вызова функции и установки флага работы
{
TIMER.Channel[Number].TimeCountingOFF=TIMER.MS;
TIMER.Channel[Number].FlagTimersOFF=1;
}
volatile uint32_t TimerToSTOP = TIMER.TimeCurrent-TIMER.Channel[Number].TimeCountingOFF;
//Если (время до старта == TimeVar) и (условия по переполнению MAX_UINT32 выполняеться),
//то OutFlag=0 и обнуляем Флаг работы
if ((TimerToSTOP >= TimeVar)&&((MAX_UINT32-TIMER.Channel[Number].TimeCountingOFF)>TimeVar))
{
OutFlag=0;
TIMER.Channel[Number].FlagTimersOFF=0;
TIMER.Channel[Number].TimeCountingOFF=0;
TimerToSTOP=0;
}
else
{
OutFlag=CurrentFlag;
//Если MAX_UINT32 переполниться быстрей чем досчитает TimeVar то обнулим таймер
if (((MAX_UINT32-TIMER.Channel[Number].TimeCountingOFF)<TimeVar))
{
TIMER.MS=0;
TIMER.Channel[Number].TimeCountingOFF=0;
}
}
sei();
return OutFlag;
}
void StartInitIO()
{
OneOUT.ByteRegister=0x00;
TwoOUT.ByteRegister=0x00;
ThreeOUT.ByteRegister=0x00;
OneIN.ByteRegister=0x00;
TwoIN.ByteRegister=0x00;
ThreeIN.ByteRegister=0x00;
FourIN.ByteRegister=0x00;
FifthIN.ByteRegister=0x00;
}
/*инициализация SPI модуля в режиме master*/
void SPI_Init(void)
{
/*настройка портов ввода-вывода
все выводы, кроме MISO выходы*/
SPI_DDR |= (1<<SPI_MOSI)|(1<<SPI_SCK)|(1<<SPI_SS)|(0<<SPI_MISO);
SPI_PORT |= (1<<SPI_MOSI)|(1<<SPI_SCK)|(1<<SPI_SS)|(1<<SPI_MISO);
SPCR = (1<<SPE)|(0<<DORD)|(1<<MSTR)|(0<<CPOL)|(0<<CPHA)|(0<<SPR1)|(1<<SPR0);
SPSR = (0<<SPI2X);
}
uint8_t SPI_UpdataByte(uint8_t data)
{
uint8_t report;
SPDR = data;
while(!(SPSR & (1<<SPIF)));
report = SPDR;
return report;
}
void SpiOutRegister()
{
SPI_PORT &= ~(1<<SPI_SS);
OneIN.ByteRegister=SPI_UpdataByte(0);
TwoIN.ByteRegister=SPI_UpdataByte(0);
ThreeIN.ByteRegister=SPI_UpdataByte(ThreeOUT.ByteRegister);
FourIN.ByteRegister=SPI_UpdataByte(TwoOUT.ByteRegister);
FifthIN.ByteRegister=SPI_UpdataByte(OneOUT.ByteRegister);
SPI_PORT |= (1<<SPI_SS);
}
/*Описание распределителей*/
#define R01TOP OneOUT.Register.DO0
#define R01DOWN OneOUT.Register.DO1
#define R02RO3 OneOUT.Register.DO2
#define R04 OneOUT.Register.DO3
#define R05 OneOUT.Register.DO4
#define R06RO7 OneOUT.Register.DO5
#define R08 OneOUT.Register.DO6
#define RO9 OneOUT.Register.DO7
#define R10 TwoOUT.Register.DO0
#define R11 TwoOUT.Register.DO1
#define R12 TwoOUT.Register.DO2
#define R13 TwoOUT.Register.DO3
#define R14 TwoOUT.Register.DO4
#define R15 TwoOUT.Register.DO5
#define R16 TwoOUT.Register.DO6
#define K1 TwoOUT.Register.DO7
#define K2 ThreeOUT.Register.DO1
/*Описание датчиков*/
#define D01 OneIN.Register.DO0
#define D02 OneIN.Register.DO1
#define D03 OneIN.Register.DO2
//#define D33 OneIN.Register.DO2
void Algoritm()
{
R01TOP=OnAfterTimeMS(1200,1,R01TOP);
R01TOP=OFFAfterTimeMS(1300,2,R01TOP);
}
int main(void)
{
SPI_Init();
StartInitIO();
InitTimers();
DDRD=0xff;// Настраиваем порт D на выход
TCCR0=(1<<CS01)|(1<<CS00); //Настраиваем пред делитель 64
TIMSK=(1<<TOIE0); // Запускаем таймер
TCNT0=131;
//TIMER.MS=MAX_UINT32-9000;
sei();
while(1)
{
SpiOutRegister();
Algoritm();
}
return 0;
}
Re: Таймеры/счётчики в AVR
Ср ноя 08, 2017 09:01:49
не перестаю удивляться тому, как простые вещи можно сделать сложными...
Re: Таймеры/счётчики в AVR
Ср ноя 08, 2017 09:12:51
Просто проще на самом деле не получается (
Re: Таймеры/счётчики в AVR
Ср ноя 08, 2017 09:14:50
Просто проще на самом деле не получается (
если вы будете решать частный случай, будет просто. а решение "в общем случае" всегда избыточно, и потому сложно. и, главное, никому никогда на практике не нужно, т.к. вся жизнь состоит из частных случаев...
Re: Таймеры/счётчики в AVR
Ср ноя 08, 2017 11:16:24
По поводу CurrentFlag функция включения планируется использоваться если CurrentFlag изначально имеет флаг FALSE.
И Соответственно как видно в теле функции она будет возвращать CurrentFlag до тех пор пока не выполниться условия (TimerToStart>=TimeVar)
И Соответственно как видно в теле функции она будет возвращать CurrentFlag до тех пор пока не выполниться условия (TimerToStart>=TimeVar)
Ну не понять мне. CurrentFlag - всегда признак, что таймер не истек? Так функция "знает" об этом признаке и без CurrentFlag.
Зачем смешивать в кучу? У Вас есть абстракция - таймер. Так? Так введите простой и понятный интерфейс:
1) включение таймера (timer_arm ())
2) если необходимо, проверку, что таймер включен (timer_armed ())
3) проверку, что таймер истек timer_expired ()
Спойлер
- Код:
typedef struct _soft_timer_t {
uint32_t start;
uint32_t timeout;
} soft_timer_t;
/*
* Включение таймера
* ~~~~~~~~~~~~~~~~~
* ВНИМАНИЕ! Если таймер включен, он перезапускается
*/
void soft_timer_arm (soft_timer_t *t, uint32_t timeout)
{
t->timeout = timeout;
if (timeout)
t->start = get_current_tick ();
}
bool_t soft_timer_armed (soft_timer_t *t)
{
return (t->timeout != 0);
}
bool_t soft_timer_expired (soft_timer_t *t)
{
uint32_t now;
if (! soft_timer_armed (t))
return 0; /* таймер не запущен, соответственно истекшим быть не может */
now = get_current_tick ();
return (now - t->start) >= t->timeout;
}
Все, теперь "наворачивайте" свою логику
А по поводу 4294967295UL то есть если к нему прибавить +1, он как я понял обнулится ?
В си переполнения никак не контролируются. Т.е. то, что Вы написали выше - верно.
Столкнулся только с одной проблемой при испытаниях кода переменная TIMER.MS была == uint16_t.
Если зафиксируем время допустим в 65530 TIMER.MS а TimeVar установим больше 5 то TIMER.MS обнулялся раньше чем выполниться условия (TimerToSTOP >= TimeVar) и соответственно происходил сбой в работе.
Если зафиксируем время допустим в 65530 TIMER.MS а TimeVar установим больше 5 то TIMER.MS обнулялся раньше чем выполниться условия (TimerToSTOP >= TimeVar) и соответственно происходил сбой в работе.
Как и писал выше, в си переполнение никак не контролируется.
- Код:
uint16_t TimeCountingON = 65530; // тик начала работы таймера
uint16_t MS = 0; // текущий тик (было переполнение)
// разница между текущим тиком и тиком начала работы таймера
uint16_t ticks_passed = MS - TimeCountingON; // ticks_passed будет 6!!!
Добавлено after 1 hour 13 minutes 3 seconds:
Просто проще на самом деле не получается (
Все работает как и задумывалось включение каждые 1300ms на 100ms.
- Код:
/* включает/выключает что надо :-) */
void on_off (bool_t on)
{
.....
}
static soft_timer_t on_off_timer;
static bool_t on;
/*включение каждые 1300ms на 100ms*/
void Algoritm()
{
soft_timer_t *t = &on_off_timer;
if (soft_timer_expired (t)) { /* таймер истек */
/* переключаем */
on ^= 1; on_off (on);
/* и перезапускаем таймер */
soft_timer_arm (t, on ? 100 : 1200);
}
}
- Код:
/* выключаем и стартуем таймер */
on_off (on = 0);
soft_timer_arm (&on_off_timer, 1200);
while(1)
{
SpiOutRegister();
Algoritm();
}
Так не проще?
Re: Таймеры/счётчики в AVR
Ср ноя 08, 2017 14:18:16
Нет, не проще.viiv писал(а):Все работает как и задумывалось включение каждые 1300ms на 100ms.
Так не проще?
Не даром у него забабахано
- Код:
#define AMOUNT_TIMERS 6 //Количество используемых таймеров
Спойлер
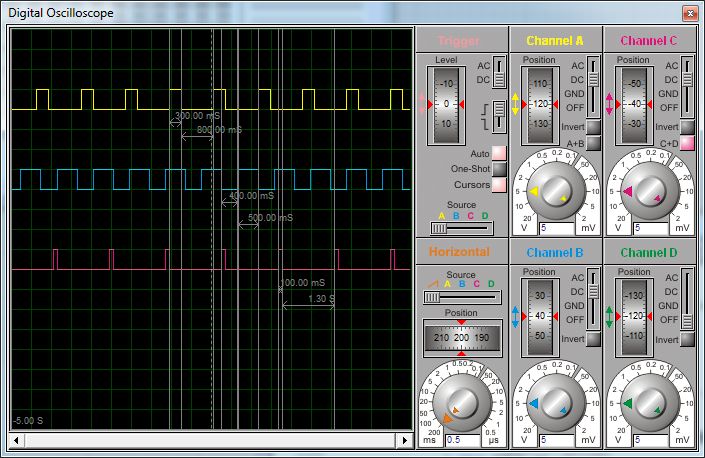 Использовал три таймера:
Использовал три таймера:1- каждые 800мс на 300мс
2- каждые 400мс на 500мс
3- каждые 1300мс на 100мс
Re: Таймеры/счётчики в AVR
Ср ноя 08, 2017 14:40:42
Полностью поставленную задачу пока не могу описать(. на данном этапе реализовал нужное количество IO и работу с таймерами(которых пока не известное количество ) сейчас принялся вкуривать как организовать управление по ModBus.
Так как хочу управлять всем с панели :
http://systemcontrol.ru/magazin/aon/kin ... /mt4532tte
Если со слейвом все просто так как есть уже готовые либы, то с мастер придется писать ручками ( пока что пред пологаю для управления использовать доп МК на котором будет реализован Master Modbas и слейв i2c.
Так как хочу управлять всем с панели :
http://systemcontrol.ru/magazin/aon/kin ... /mt4532tte
Если со слейвом все просто так как есть уже готовые либы, то с мастер придется писать ручками ( пока что пред пологаю для управления использовать доп МК на котором будет реализован Master Modbas и слейв i2c.
Re: Таймеры/счётчики в AVR
Ср ноя 08, 2017 15:11:18
когда-то давно мне тоже приспичило сделать "много гибких таймеров"... я сделал примерно так:
установили таймер, получили его номер. потом проверяем по этому номеру, когда истечет и принимаем меры.
- Код:
// установка очередного таймера. если успешно, возвращает номер таймера, если не успешно, возвращает TIMER_ERROR
uint8_t set_timer(timer_t t);
// проверка указанного таймера. Если истек, возвращает 1, если не истек, возвращает 0, если номер не корректный - возвращает TIMER_ERROR
uint8_t timeout(uint8_t timer_id);
typedef uint16_t timer_t;
static timer_t timers[TIMER_CNT];
ISR(TIMER0_OVF_vect){
for(uint8_t i=0; i<TIMER_CNT; i++){
if(timers[i] != TIMER_FREE){
if(timers[i]) timers[i]--;
}
}
}
uint8_t set_timer(timer_t t){
if(t > TIMER_MAX) return TIMER_ERROR;
for(uint8_t i=0; i<TIMER_CNT; i++){
ATOMIC_BLOCK(ATOMICK_RESTORE_STATE){
if(timers[i] == TIMER_FREE){
timers[i] = t;
return i;
}
}
}
return TIMER_ERROR;
}
uint8_t timeout(uint8_t timer_id){
if(timer_id >= TIMER_CNT) return TIMER_ERROR;
ATOMIC_BLOCK(ATOMICK_RESTORE_STATE){
if(timers[timer_id] == TIMER_FREE) return TIMER_ERROR;
if(timers[timer_id] != 0) return 0;
else {
timers[timer_id] = TIMER_FREE;
return 1;
}
}
}
установили таймер, получили его номер. потом проверяем по этому номеру, когда истечет и принимаем меры.
Re: Таймеры/счётчики в AVR
Чт ноя 09, 2017 03:00:05
а в чем разница между обычным выполнением и ATOMIC_BLOCK(ATOMICK_RESTORE_STATE) ?
Re: Таймеры/счётчики в AVR
Чт ноя 09, 2017 07:02:43
ATOMIC_BLOCK обеспечивает атомарное выполнение операций в своем блоке. в отличие от традиционного запрета-разрешения прерываний ATOMIC_BLOCK не портит текущий контекст разрешения прерываний, т.е. не разрешит их, если до этого они были запрещены.
Re: Таймеры/счётчики в AVR
Чт ноя 09, 2017 07:35:15
Вот 16 таймеров. Хватит?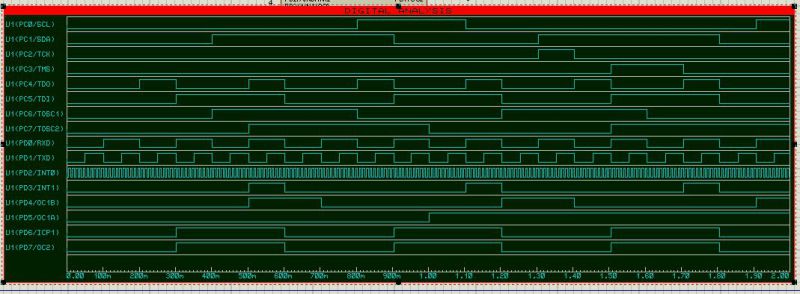
1- каждые 800мс на 300мс
2- каждые 400 мс на 500 мс
3- каждые 1300 мс на 100 мс
4- каждые 1500 мс на 200 мс
5- каждые 200 мс на 100 мс
6- каждые 300 мс на 300 мс
7- каждые 400 мс на 400 мс
8- каждые 500 мс на 500 мс
9- каждые 100 мс на 100 мс
10- каждые 50 мс на 50 мс
11- каждые 5 мс на 5 мс
12- каждые 500 мс на 100 мс
13- каждые 500 мс на 200 мс
14- каждые 1000 мс на 1000 мс
15- каждые 300 мс на 300 мс
16- каждые 300 мс на 300 мс
Спойлер
1- каждые 800мс на 300мс
2- каждые 400 мс на 500 мс
3- каждые 1300 мс на 100 мс
4- каждые 1500 мс на 200 мс
5- каждые 200 мс на 100 мс
6- каждые 300 мс на 300 мс
7- каждые 400 мс на 400 мс
8- каждые 500 мс на 500 мс
9- каждые 100 мс на 100 мс
10- каждые 50 мс на 50 мс
11- каждые 5 мс на 5 мс
12- каждые 500 мс на 100 мс
13- каждые 500 мс на 200 мс
14- каждые 1000 мс на 1000 мс
15- каждые 300 мс на 300 мс
16- каждые 300 мс на 300 мс
Re: Таймеры/счётчики в AVR
Пт ноя 10, 2017 10:11:05
Доброго времени суток.
Подскажите что делаю не так?
Хочу настроить таймер0 микроконтролера атмега8 на приривание по переполнению но ничево не получается.
Использую програму codevisionavr и симулятор Proteus.
Заметил что когда ставить делитель на 128 в регистре TCCR0=0x05 то преривание работает, а если ставить 256 и 1024 то не работает.В чем может быть проблема?
Зарание спасибо за помощь.
Подскажите что делаю не так?
Хочу настроить таймер0 микроконтролера атмега8 на приривание по переполнению но ничево не получается.
Использую програму codevisionavr и симулятор Proteus.
- Код:
/*****************************************************
This program was produced by the
CodeWizardAVR V2.05.0 Evaluation
Automatic Program Generator
© Copyright 1998-2010 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project :
Version :
Date : 10.11.2017
Author : Freeware, for evaluation and non-commercial use only
Company :
Comments:
Chip type : ATmega8
Program type : Application
AVR Core Clock frequency: 8,000000 MHz
Memory model : Small
External RAM size : 0
Data Stack size : 256
*****************************************************/
#include <mega8.h>
// Timer 0 overflow interrupt service routine
interrupt [TIM0_OVF] void timer0_ovf_isr(void)
{
// Place your code here
PORTC.0=1;
}
// Declare your global variables here
void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTB=0x00;
DDRB=0x00;
// Port C initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=Out
// State6=T State5=T State4=T State3=T State2=T State1=T State0=0
PORTC=0x00;
DDRC=0xff;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
TCCR0=0x07;
TCNT0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer1 Stopped
// Mode: Normal top=0xFFFF
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x00;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer2 Stopped
// Mode: Normal top=0xFF
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
MCUCR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x01;
// USART initialization
// USART disabled
UCSRB=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC disabled
ADCSRA=0x00;
// SPI initialization
// SPI disabled
SPCR=0x00;
// TWI initialization
// TWI disabled
TWCR=0x00;
// Global enable interrupts
#asm("sei")
while (1)
{
// Place your code here
}
}
Заметил что когда ставить делитель на 128 в регистре TCCR0=0x05 то преривание работает, а если ставить 256 и 1024 то не работает.В чем может быть проблема?
Зарание спасибо за помощь.
Re: Таймеры/счётчики в AVR
Пт ноя 10, 2017 10:26:06
- Код:
TCCR0=0x07;
Re: Таймеры/счётчики в AVR
Пт ноя 10, 2017 10:41:21
- Код:
TCCR0=0x07;
А как настроить от внутреннего генератора?
Re: Таймеры/счётчики в AVR
Пт ноя 10, 2017 10:54:15
Спойлер
- Вложения
-
- TCCR0_M8.PNG
- (79.26 KiB) Скачиваний: 458
Re: Таймеры/счётчики в AVR
Пт ноя 10, 2017 11:57:38
Спасибо разобрался  ))))
))))
У меня просто рускоязычный перевод даташита и там была неточность. Вчера весь вечер не мог понять в чем дело)))
Так что нужно учить английский
))))У меня просто рускоязычный перевод даташита и там была неточность. Вчера весь вечер не мог понять в чем дело)))
Так что нужно учить английский
Re: Таймеры/счётчики в AVR
Вт дек 05, 2017 17:57:11
Всем добрый день.
Вопросик есть, мне нужен таймер, с 2мя каналами на atmega8 или 328, к сожалению программную среду атмег я почти не знаю. Тем не менее хочу спросить может кто поможет.
Суть, нужно что-бы канал работал допустим 10ч а потом был выключен 14ч, 2й так-же но независимо от первого, и фоторезистор который не останавливает таймеры но блокирует работу обоих каналов, то есть если я посветил светом, канал отключиться но когда наступит темнота если время рабочего состояния на таймере еще не истекло он включит канал.
Я поискал на просторах интернета и нашел некоторые схемы и прошивки к ним но они все с дисплеями и ручными настройками, я ищу вариант без дисплея где у меня есть 1 кнопка RESET которая коротким нажатием запускает таймер одного канала и начинает его отсчет а последующим коротким нажатием запускает таймер второго канала и начинает его счет, а долгим нажатием сбрасывает оба, настройка интервалов таймеров через исходники.
Схему вроде собрать могу а вот программную часть не знаю как реализовать...
Вопросик есть, мне нужен таймер, с 2мя каналами на atmega8 или 328, к сожалению программную среду атмег я почти не знаю. Тем не менее хочу спросить может кто поможет.
Суть, нужно что-бы канал работал допустим 10ч а потом был выключен 14ч, 2й так-же но независимо от первого, и фоторезистор который не останавливает таймеры но блокирует работу обоих каналов, то есть если я посветил светом, канал отключиться но когда наступит темнота если время рабочего состояния на таймере еще не истекло он включит канал.
Я поискал на просторах интернета и нашел некоторые схемы и прошивки к ним но они все с дисплеями и ручными настройками, я ищу вариант без дисплея где у меня есть 1 кнопка RESET которая коротким нажатием запускает таймер одного канала и начинает его отсчет а последующим коротким нажатием запускает таймер второго канала и начинает его счет, а долгим нажатием сбрасывает оба, настройка интервалов таймеров через исходники.
Схему вроде собрать могу а вот программную часть не знаю как реализовать...
Re: Таймеры/счётчики в AVR
Вс янв 14, 2018 14:08:22
Привет! Кто сталкивался с такой проблемой?
Очищаю и запускаю таймер вот так:
out TCCR0B, temp
ldi temp, (1<<OCF0A) //Очищаем прерывание
out TIFR0, temp
ldi temp, 0 //Очищаем таймер
out TCNT0, temp
ldi temp, (0<<COM0A1)|(0<<COM0A0)|(1<<WGM01)|(0<<WGM00) //Режим CTC, без дрыгания ногой
out TCCR0A, temp
ldi temp, 124 //Сравниваем с 124 (дает 1 секунду при делителе 1024 и 128 кГц тактовой)
out OCR0A, temp
ldi temp, (1<<OCIE0A) //Включаем прерывание по OCIE0A
out TIMSK0, temp
ldi temp, (0<<WGM02)|(1<<CS02)|(0<<CS01)|(1<<CS00) //Запускаем делитель 1024
out TCCR0B, temp
По идее таймер должен запуститься, досчитать до 124 и вылететь в прерывание. В симуляторе 4й студии так и есть. А вот в протеусе (в версиях 7.1 и 8.6) прерывание вылетает как только счетчик сделает один тик, т.е. когда TCNT0 меняет свое значение с 0 на 1. Шо за БАГ? Может неправильная последовательность запуска и очистки? До выполнения приведенного кода таймер использовался в другом режиме с другим делителем.
Очищаю и запускаю таймер вот так:
Спойлер
ldi temp, (0<<WGM02)|(0<<CS02)|(0<<CS01)|(0<<CS00) //Стоп таймерout TCCR0B, temp
ldi temp, (1<<OCF0A) //Очищаем прерывание
out TIFR0, temp
ldi temp, 0 //Очищаем таймер
out TCNT0, temp
ldi temp, (0<<COM0A1)|(0<<COM0A0)|(1<<WGM01)|(0<<WGM00) //Режим CTC, без дрыгания ногой
out TCCR0A, temp
ldi temp, 124 //Сравниваем с 124 (дает 1 секунду при делителе 1024 и 128 кГц тактовой)
out OCR0A, temp
ldi temp, (1<<OCIE0A) //Включаем прерывание по OCIE0A
out TIMSK0, temp
ldi temp, (0<<WGM02)|(1<<CS02)|(0<<CS01)|(1<<CS00) //Запускаем делитель 1024
out TCCR0B, temp
По идее таймер должен запуститься, досчитать до 124 и вылететь в прерывание. В симуляторе 4й студии так и есть. А вот в протеусе (в версиях 7.1 и 8.6) прерывание вылетает как только счетчик сделает один тик, т.е. когда TCNT0 меняет свое значение с 0 на 1. Шо за БАГ? Может неправильная последовательность запуска и очистки? До выполнения приведенного кода таймер использовался в другом режиме с другим делителем.