Re: Создание ЧПУ
Сб май 19, 2018 20:43:25
что, и здесь тоже?))
Re: Создание ЧПУ
Вс май 20, 2018 15:23:00
Не реклама))
Re: Создание ЧПУ
Чт сен 06, 2018 09:42:25
Друзья, а кто-нибудь покупал станки российского производства? Можете порекомендовать производителя? Цена в районе 100-120 тыс
здесь как раз тот случай, когда и нужно покупать российского производства.
за эту сумму можно купить вполне достойный станок.
Вот еще одна контора со станками.
http://vectorcnc.ru/
Плюс в том, что могут сделать то, что нужно. На заказ.
Базовая версия около 40 тыр. Естественно без шпинделя - у всех разные задачи.
Брал у них комплектующие. Доволен. Цена не выше, чем на али, а качество - гораздо лучше. Еще один большой плюс - продавец в теме. Понимает что продаёт.
Re: Создание ЧПУ
Чт сен 06, 2018 23:02:14
Станками?Тихон писал(а):Вот еще одна контора со станками
У них на сайте всего 1 станок (точнее - станочек). Ассортимент всего остального я бы также назвал скудным. В качестве контактных данных указан только г. Королёв, номер мобильного телефона и e-mail. Ни конкретного адреса, ни названия юр.лица - ничего. Блог компании, новости, анонсы - всё пусто.
Разумеется, всё это не свидетельствует именно о том, что конторка липовая. Но, если она действительно работает, такие "скрытность" и пустота сайта играют ей в огромный минус.
Спойлер
Кроме того, откуда Тихон? Он сам указал - "Московская область". А где г. Королёв? Ещё один "любопытный нюансик".Re: Создание ЧПУ
Пт сен 14, 2018 07:45:27
Перечитал немного тему и вдруг обнаружил две вещи. Во первых, оказалось это Sailenser ненароком подсадил меня на канал Бербраера, за что огромное спасибо! Во вторых, я так и не отчитался о драйверах TB6600, может кому то эта информация будет полезна.
В общем то TB6560 оказались не так уж и плохи, при условии прокладки проводов шпинделя вне гусеницы с остальными проводами, с тех пор самовольное перемещение не повторялось, оси после работы возвращались в ту же точку. Для моих задач параметров драйверов хватало, правда без запаса, холостые перемещения на тот момент были 1.5 м/мин, МДФ вроде тогда грыз на скорости 800 мм/мин, 1 мм за проход двухзаходной фрезой. Все время напрягал только шум движков на удержании, который проводился винтами и звучал как шипение открытого крана в период отключения воды, уже через пол часа жутко болела голова. В принципе можно было смириться, но TB6600 уже прошли таможню, правда им было суждено пролежать в шкафу еще пол года. Дело в том что с TB6600 оси перестали возвращаться в исходное положение, при чем недоезд зависел напрямую от количества «челночных» перемещений, довольно быстро был нагуглен подобный вопрос. Тема на тот момент была не такая большая и вопрос разрешился только у одного человека, по его пути я и последовал, суть была в том, что на линии Dir стояла дешевая оптопара которая не успевала переключаться перед следующим шагом и шаг происходил в неверном направлении, при чем изменение логического уровня запаздывало только на одном из фронтов, и ошибка набегала только в одном направлении. И опять засада, радиаторы драйверов перекрывают доступ паяльника к оптопарам и приклеены на мертво, фен, морозилка, растворители, скальпель, отвертка с молотком, оставили только покрошившиеся углы корпуса микросхемы, в итоге радиаторы были кастрированны с помощью отрезной машинки, в несколько заходов, что бы не перегреть микросхемы. Дерьмовые оптопары были заменены на 6N137 навесным монтажом, в один драйвер поставил 6N136 для эксперимента, то же работает, так и оставил.
Но конец был еще далек, ошибка перестала зависеть от направления и количества перемещений, дело в том что одновременно с этими событиями у меня сменился комп на который WinXP уже не вставала. Голая Win7(32bit) же стала проявлять неприятные особенности, во первых она подвисала на долю секунды в самый ответственный момент в связи с чем происходила потеря шагов и порча заготовки, происходило это редко - в среднем раз в 10 дней. Во вторых, что для меня оказалось совсем странным, Win7 оказалась неспособной выдерживать логический уровень на COM порте, который находился на плате расширения, хотя со встроенным COM портом старого компа этой проблемы не было. Вскрылось это после долгой возни с осциллографом, совершенно случайно, я обратил внимание на то, что с нажатой кнопкой E-stop через несколько секунд начинало щелкать реле шпинделя около раза в секунду, хотя на прошлом компе такого не было. Так как про вину семерки я еще не знал, то меня постигло полное смятение, но чтобы окончательно закрыть вопрос я решил на удачу поставить LinuxCNC, каково же было мое удивление когда все эти проблемы исчезли, в процессе этой возни к тому же выяснилось что китаец в инструкции перепутал уровни сигналов, с семеркой в обоих случаях были недоезды, а с LinuxCNC при изменении уровней на соответствующие логике работы контроллера все стало работать без ошибок.
З.Ы. Извиняюсь за многабуков, но думаю это хорошо иллюстрирует то количество геморроя которого можно было избежать если бы я сразу поставил LinuxCNС, особенно учитывая что с интерфейсом Gmoccapy он довольно не плох, вся функциональность которой я раньше пользовался с ним доступна, я потерял разве что в удобстве, для некоторых простых действий приходится переключаться в другие режимы, что поначалу вводит в ступор.
В общем то TB6560 оказались не так уж и плохи, при условии прокладки проводов шпинделя вне гусеницы с остальными проводами, с тех пор самовольное перемещение не повторялось, оси после работы возвращались в ту же точку. Для моих задач параметров драйверов хватало, правда без запаса, холостые перемещения на тот момент были 1.5 м/мин, МДФ вроде тогда грыз на скорости 800 мм/мин, 1 мм за проход двухзаходной фрезой. Все время напрягал только шум движков на удержании, который проводился винтами и звучал как шипение открытого крана в период отключения воды, уже через пол часа жутко болела голова. В принципе можно было смириться, но TB6600 уже прошли таможню, правда им было суждено пролежать в шкафу еще пол года. Дело в том что с TB6600 оси перестали возвращаться в исходное положение, при чем недоезд зависел напрямую от количества «челночных» перемещений, довольно быстро был нагуглен подобный вопрос. Тема на тот момент была не такая большая и вопрос разрешился только у одного человека, по его пути я и последовал, суть была в том, что на линии Dir стояла дешевая оптопара которая не успевала переключаться перед следующим шагом и шаг происходил в неверном направлении, при чем изменение логического уровня запаздывало только на одном из фронтов, и ошибка набегала только в одном направлении. И опять засада, радиаторы драйверов перекрывают доступ паяльника к оптопарам и приклеены на мертво, фен, морозилка, растворители, скальпель, отвертка с молотком, оставили только покрошившиеся углы корпуса микросхемы, в итоге радиаторы были кастрированны с помощью отрезной машинки, в несколько заходов, что бы не перегреть микросхемы. Дерьмовые оптопары были заменены на 6N137 навесным монтажом, в один драйвер поставил 6N136 для эксперимента, то же работает, так и оставил.
Но конец был еще далек, ошибка перестала зависеть от направления и количества перемещений, дело в том что одновременно с этими событиями у меня сменился комп на который WinXP уже не вставала. Голая Win7(32bit) же стала проявлять неприятные особенности, во первых она подвисала на долю секунды в самый ответственный момент в связи с чем происходила потеря шагов и порча заготовки, происходило это редко - в среднем раз в 10 дней. Во вторых, что для меня оказалось совсем странным, Win7 оказалась неспособной выдерживать логический уровень на COM порте, который находился на плате расширения, хотя со встроенным COM портом старого компа этой проблемы не было. Вскрылось это после долгой возни с осциллографом, совершенно случайно, я обратил внимание на то, что с нажатой кнопкой E-stop через несколько секунд начинало щелкать реле шпинделя около раза в секунду, хотя на прошлом компе такого не было. Так как про вину семерки я еще не знал, то меня постигло полное смятение, но чтобы окончательно закрыть вопрос я решил на удачу поставить LinuxCNC, каково же было мое удивление когда все эти проблемы исчезли, в процессе этой возни к тому же выяснилось что китаец в инструкции перепутал уровни сигналов, с семеркой в обоих случаях были недоезды, а с LinuxCNC при изменении уровней на соответствующие логике работы контроллера все стало работать без ошибок.
З.Ы. Извиняюсь за многабуков, но думаю это хорошо иллюстрирует то количество геморроя которого можно было избежать если бы я сразу поставил LinuxCNС, особенно учитывая что с интерфейсом Gmoccapy он довольно не плох, вся функциональность которой я раньше пользовался с ним доступна, я потерял разве что в удобстве, для некоторых простых действий приходится переключаться в другие режимы, что поначалу вводит в ступор.
Re: Создание ЧПУ
Пт сен 14, 2018 20:51:36
Станками?Тихон писал(а):Вот еще одна контора со станками
У них на сайте всего 1 станок (точнее - станочек).
Спойлер
Кроме того, откуда Тихон? Он сам указал - "Московская область". А где г. Королёв? Ещё один "любопытный нюансик".Пиарить кого-то не собираюсь. Кому надо - позвонит, уточнит и заедет в гости. В Королёве он. Был там. Нет там никакой липы.
А что не хватает я не понял. Моторов и шпинделей нету. Остальное вроде всё есть, что надо для ЧПУ.
Хотя - потребности у всех разные.
Вот еще одного вспомнил. Даже на выставке видел. Много станков. Но недешевые.
ООО СК роутер
http://cncrouter.ru/site/#
А что касается подозрительности - то есть на форуме специальная тема. Но просьба не сгружать туда подозрения. А только проверенные факты.
Re: Создание ЧПУ
Чт окт 11, 2018 04:36:59
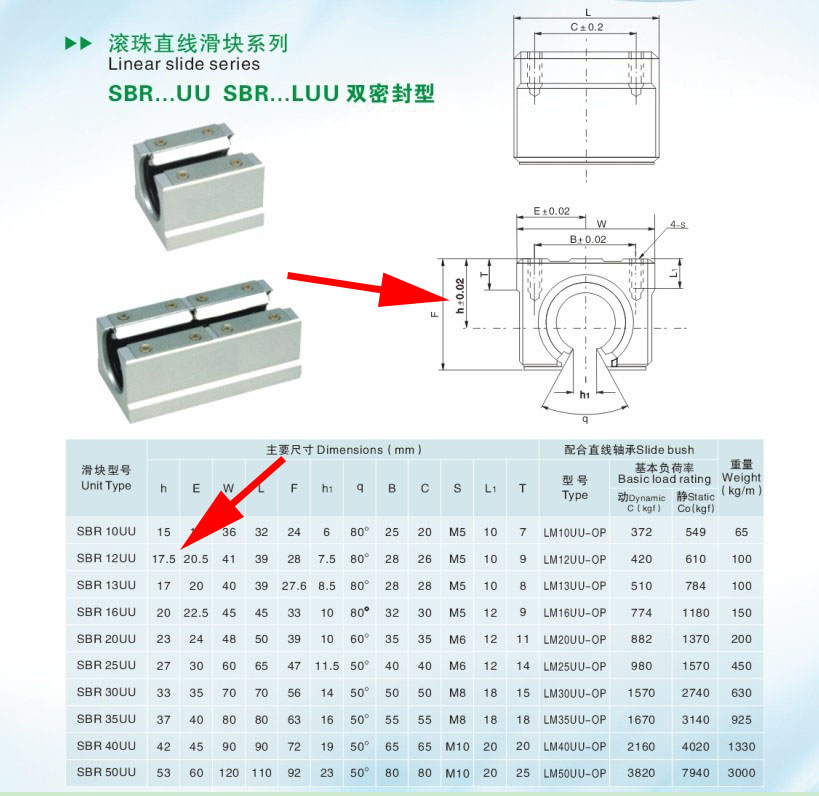
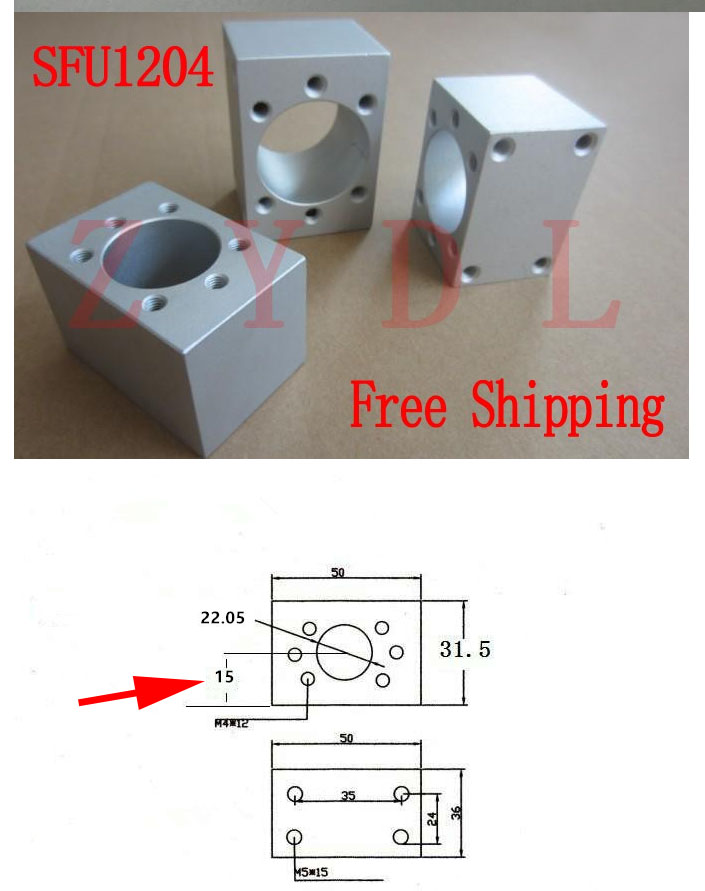
Моделирую станок - стол катается на валах 12 мм. и приводится в движение ШВП 1204.
К валам крепится линейными подшипниками:

К ШВП 1204 - гайкой:

Но обратите внимание на расстояния от центров валов и ШВП до поверхностей, которые будут сопрягаться собственно со столом - указал красными стрелками:
- у линейных подшипников - 17.5 мм.
- у гайки ШВП - 15 мм.
Причём, эти расстояния подтверждаются и скачанными из разных источников моделями SolidWorks - то есть, выходит, это не ошибка.
Но как так? Получается, что стол по определению не ляжет ровно и придётся городить прокладки или спиливать целых 2.5 мм. ?
Где и что я не понимаю?
К валам крепится линейными подшипниками:
К ШВП 1204 - гайкой:
Но обратите внимание на расстояния от центров валов и ШВП до поверхностей, которые будут сопрягаться собственно со столом - указал красными стрелками:
- у линейных подшипников - 17.5 мм.
- у гайки ШВП - 15 мм.
Причём, эти расстояния подтверждаются и скачанными из разных источников моделями SolidWorks - то есть, выходит, это не ошибка.
Но как так? Получается, что стол по определению не ляжет ровно и придётся городить прокладки или спиливать целых 2.5 мм. ?
Где и что я не понимаю?
Re: Создание ЧПУ
Чт окт 11, 2018 06:43:11
smacorp
А ось швп и ось направляющих обязательно должны совпадать?
Можно же сделать ось швп выше оси направляющих на те же 2,5 мм. (зачем что то стачивать?).
Вот так у меня, все в одной плоскости.. https://radiokot.ru/forum/viewtopic.php ... 5#p1979845
Но похоже это заводской колхоз, так как таких блоков крепления швп я не видел в продаже. Они сделаны из таких же блоков подшипников (гайка к этому блоку крепится всего на 2 болта).
А ось швп и ось направляющих обязательно должны совпадать?
Можно же сделать ось швп выше оси направляющих на те же 2,5 мм. (зачем что то стачивать?).
Вот так у меня, все в одной плоскости.. https://radiokot.ru/forum/viewtopic.php ... 5#p1979845
Но похоже это заводской колхоз, так как таких блоков крепления швп я не видел в продаже. Они сделаны из таких же блоков подшипников (гайка к этому блоку крепится всего на 2 болта).
Re: Создание ЧПУ
Чт окт 11, 2018 07:23:21
А ось швп и ось направляющих обязательно должны совпадать?
Можно же сделать ось швп выше оси направляющих на те же 2,5 мм. (зачем что то стачивать?)
Можно же сделать ось швп выше оси направляющих на те же 2,5 мм. (зачем что то стачивать?)
Рама станка из профиля будет, поэтому оси автоматически совпадают, и я не вижу относительно простого способа их установки на разных уровнях. Проще прокладками выровнять.
Re: Создание ЧПУ
Пт окт 26, 2018 17:47:20
Но как так?
а что не так, собственно? возьмите другие валы - будет еще более другое расстояние. Другую ШВП - аналогично. Это ж штуки общего назначения, а не комплект.
Re: Создание ЧПУ
Сб дек 01, 2018 19:24:27
Интересный видео-канал изготовления Мега-ЧПУ станка в частном порядке
WoodLab86
WoodLab86
Re: Создание ЧПУ
Пт мар 22, 2019 22:26:23
Здравствуйте уважаемые Коты! Нашел на АЛИ мотор для сверления ПП. Смущает что у мотора только два вывода по питанию. Если мотор Бесщеточный, то должны быть датчики положения ротора. Или это какое то китайское чудо? Может кто то под скажет как правильно запитать мотор?
795 DC мотор. Конструкция: С параллельной обмоткой. Выходная мощность: 60w Коммутация:Бесщеточный Непрерывный Ток (A): 2.05A Номинальное напряжение: DC12V-24 В Скорость без нагрузки: 12V10000-24V20000
795 DC мотор. Конструкция: С параллельной обмоткой. Выходная мощность: 60w Коммутация:Бесщеточный Непрерывный Ток (A): 2.05A Номинальное напряжение: DC12V-24 В Скорость без нагрузки: 12V10000-24V20000
Re: Создание ЧПУ
Сб мар 23, 2019 00:03:33
Здравствуйте уважаемые Коты! Нашел на АЛИ мотор для сверления ПП. Смущает что у мотора только два вывода по питанию. Если мотор Бесщеточный, то должны быть датчики положения ротора. Или это какое то китайское чудо? Может кто то под скажет как правильно запитать мотор?
795 DC мотор. Конструкция: С параллельной обмоткой. Выходная мощность: 60w Коммутация:Бесщеточный Непрерывный Ток (A): 2.05A Номинальное напряжение: DC12V-24 В Скорость без нагрузки: 12V10000-24V20000
795 DC мотор. Конструкция: С параллельной обмоткой. Выходная мощность: 60w Коммутация:Бесщеточный Непрерывный Ток (A): 2.05A Номинальное напряжение: DC12V-24 В Скорость без нагрузки: 12V10000-24V20000
это обычный DC мотор, такие же стоят в шуруповертах... разумеется никаких датчиков положения там нет и быть не может, питать как любой подобный DC мотор.
то, что пишут Коммутация:Бесщеточный, вранье
Re: Создание ЧПУ
Сб мар 23, 2019 00:53:01
Моделирую станок - стол катается на валах 12 мм. и приводится в движение ШВП 1204.
К валам крепится линейными подшипниками:
К валам крепится линейными подшипниками:
Что- то мне всегда казалось, что "линейный подшипник" для вала должен быть вот такой:

а ваши "линейные подшипники" предназначены вот для таких направляющих:

Вал 12 мм в качестве направляющей, годится только для мелкого станка..
Re: Создание ЧПУ
Сб мар 23, 2019 00:57:46
АлександрЛ писал(а):а ваши "линейные подшипники" предназначены вот для таких направляющих
С чего Вы это взяли? "Мои" линейные подшипники отличаются от "Ваших" тем, что имеют возможность лёгкой выборки люфта. А по какого типа направляющим они будут кататься, глубоко параллельно.
Re: Создание ЧПУ
Сб мар 23, 2019 01:04:22
Иметь своё мнение по этому вопросу- ваше право.. 
Я руководствуюсь тем, что прочитал, вот тут, например:
https://cnc-tehnologi.ru/linejnye-podshipniki-i-modul
и собственным опытом..
Я руководствуюсь тем, что прочитал, вот тут, например:
https://cnc-tehnologi.ru/linejnye-podshipniki-i-modul
и собственным опытом..
Re: Создание ЧПУ
Сб мар 23, 2019 19:41:57
Jeri:
Спасибо. Я так и предполагал
Спасибо. Я так и предполагал
Re: Создание ЧПУ
Ср апр 03, 2019 21:06:33
Нужен лайфхак по рельсовым направляющим. Купил у китайцев рельсу MGW7 и каретку MGW7H. В процессе доставки часть шариков потерялась (это отдельная история). Так вот, есть несколько вопросов:
1. Какой диаметр шариков заказывать? Цифровой штангель показывает 1,48 мм, микрометр при зажатии трещеткой 1,49-1,495. При ослаблении микрометра (шарик между штоками держится, не выпадает) - чуть больше 1,5 мм. Склоняюсь к диаметру 1,5, но на всякий случай закажу, наверное, еще и 1,49.
2. Какой зазор между шариками надо оставлять при заполнении каретки? Где-то читал, что в бессепараторных подшипниках зазоро должен быть примерно в один шарик. Как с этим обстоят дела в рельсовых направляющих?
3. Если не трудно - ссылочку на методику промывки/чистки/смазки девайса. На ютубе нашел пару видео, но там только смазка, и то MGN15 со встроенной в каретку тавотницей.
PS
Шариков не хватает, наверное, процентов двадцать, но люфтов (на ощупь) нету вообще ни в какой плоскости. Каретка под своим весом перемещается при наклоне рельса на 35-45 градусов. Не знаю, как долго она проработает, но первое впечатление положительное. Хочу использовать в Лазерная установка для засветки фоторезиста от AlphaCrow
1. Какой диаметр шариков заказывать? Цифровой штангель показывает 1,48 мм, микрометр при зажатии трещеткой 1,49-1,495. При ослаблении микрометра (шарик между штоками держится, не выпадает) - чуть больше 1,5 мм. Склоняюсь к диаметру 1,5, но на всякий случай закажу, наверное, еще и 1,49.
2. Какой зазор между шариками надо оставлять при заполнении каретки? Где-то читал, что в бессепараторных подшипниках зазоро должен быть примерно в один шарик. Как с этим обстоят дела в рельсовых направляющих?
3. Если не трудно - ссылочку на методику промывки/чистки/смазки девайса. На ютубе нашел пару видео, но там только смазка, и то MGN15 со встроенной в каретку тавотницей.
PS
Шариков не хватает, наверное, процентов двадцать, но люфтов (на ощупь) нету вообще ни в какой плоскости. Каретка под своим весом перемещается при наклоне рельса на 35-45 градусов. Не знаю, как долго она проработает, но первое впечатление положительное. Хочу использовать в Лазерная установка для засветки фоторезиста от AlphaCrow
Re: Создание ЧПУ
Ср апр 03, 2019 21:15:39
mr_kot:
1. С шариками угадать трудно. Измеряйте диаметр имеющихся, а потом берите наборы с допуском в несколько шагов в обе стороны. С каким-нибудь угадаете. А вообще, многие продавцы идут на встречу и бесплатно высылают шарики дополнительно, если об этом попросить. Ну, или доплатите немного.
2. Тоже обычно место под 1 шарик пустым оставляют.
3. Хороший туториал почти под Ваш набор.
1. С шариками угадать трудно. Измеряйте диаметр имеющихся, а потом берите наборы с допуском в несколько шагов в обе стороны. С каким-нибудь угадаете. А вообще, многие продавцы идут на встречу и бесплатно высылают шарики дополнительно, если об этом попросить. Ну, или доплатите немного.
2. Тоже обычно место под 1 шарик пустым оставляют.
3. Хороший туториал почти под Ваш набор.
Re: Создание ЧПУ
Чт апр 04, 2019 07:31:31
Спасибо за ответ.
Проблема в том, что шарики в таком размере нашел только у одного продавца (1,48; 1,49; 1,5). В основном предлагают 1,4 и 1,5. После 1,5 размеры доступны до тысячной (1,538; 1,588).
Написал продавцу, у которого покупал рельс, но пока ответа нету. Да и в ассортменте у него в магазине только рельсы с каретками и ШВП, шариков нету.
Скорее всего, если этот продавец не ответит, возьму три размера (1,48; 1,49; 1,5), а дальше видно будет.
Может у него еще одну каретку заказать? Тогда он и шариков насыпет
Проблема в том, что шарики в таком размере нашел только у одного продавца (1,48; 1,49; 1,5). В основном предлагают 1,4 и 1,5. После 1,5 размеры доступны до тысячной (1,538; 1,588).
Написал продавцу, у которого покупал рельс, но пока ответа нету. Да и в ассортменте у него в магазине только рельсы с каретками и ШВП, шариков нету.
Скорее всего, если этот продавец не ответит, возьму три размера (1,48; 1,49; 1,5), а дальше видно будет.
Может у него еще одну каретку заказать? Тогда он и шариков насыпет