Тахометр на STM32F103
Пт окт 05, 2018 20:34:36
Хочу сделать тахометр на STM32F103 и датчике холла 3144. Подскажите как лучше это реализовать. Использовать прерывания или опрашивать ножку МК для обнаружения сигнала прохождения магнита? Как считать интервал времени между прохождением магнита - таймер или RTC?
Re: Тахометр на STM32F103
Пт окт 05, 2018 21:42:09
Таймеры STM32F103 поддерживают датчик холла.
DWT.KNF18 писал(а):Как считать интервал времени между прохождением магнита - таймер или RTC?
Re: Тахометр на STM32F103
Сб окт 06, 2018 08:32:44
можно использовать режим захвата в таймере
https://hubstub.ru/stm32/128-stm32-rezhim-zahvata.html
Например, если на счетный вход таймера подана частота 1МГц
60 об/мин = 1 об/сек
за 1 сек при частоте 1МГц в регистр захвата запишется число N=1000000
Считаем обороты:
X об/мин = (1000000/N)*60
Режим захвата — это особый режим работы таймера, суть которого в следующем, при изменении логического уровня на определённом выводе микроконтроллера, значение счётного регистра записывается в другой регистр, который именуют регистром захвата.
Для чего это надо?
С помощью этого режима можно измерить длительность импульса или период сигнала.
https://hubstub.ru/stm32/128-stm32-rezhim-zahvata.html
Например, если на счетный вход таймера подана частота 1МГц
60 об/мин = 1 об/сек
за 1 сек при частоте 1МГц в регистр захвата запишется число N=1000000
Считаем обороты:
X об/мин = (1000000/N)*60
Re: Тахометр на STM32F103
Вс окт 07, 2018 20:12:46
Спасибо за информацию, попробую разобраться как это реализовать на HAL + CubeMX.
Re: Тахометр на STM32F103
Вс окт 07, 2018 20:20:44
Таймеры STM32F103 поддерживают датчик холла.
DWT.KNF18 писал(а):Как считать интервал времени между прохождением магнита - таймер или RTC?
Мурсик, не надо чушь всякую советовать забудь про DWT. И не путай людей. Как всегда

KNF18, не надо никаких калокубов и халов использовать. Если так чешется говнолибы юзать, то хотя бы слой LL юзайте как вы это любите.
Открываем референс мануал и читаем 14.3.18
Последний раз редактировалось Oxford Вс окт 07, 2018 20:41:20, всего редактировалось 2 раз(а).
Re: Тахометр на STM32F103
Вс окт 07, 2018 20:38:36
неужели нет готовой схемки частотомера на стм? так вот тьахометр это тотже частотомер просто для 4тактного двигла надо умножать частоту на 60х сделать это можно или выбором интевала или умножением средствами мк
Re: Тахометр на STM32F103
Вс окт 07, 2018 20:41:18
Критиковать каждый может, Но совета ТС от вас так и не последовало. Что вы ему посоветуйте именно в контексте измерения времени а не в плате что можно сделать по другому?Oxford писал(а):Мурсик, не надо чушь всякую советовать забудь про DWT.
Re: Тахометр на STM32F103
Вс окт 07, 2018 20:50:23
А что критиковать, чушь она и есть чушь.
На таймере все получится аппаратно, а вот DWT в некоторых камнях просто нет.
Это как здесь уже был цЫрк со static , один клоун "обнаружил" и все нубы стали лепить где не поподя.
Так же и с DWT...
Частотомер здесь уже неоднократнь всплывал, простой и весьма действенный. Искать по Reciprocal counter...
На таймере все получится аппаратно, а вот DWT в некоторых камнях просто нет.
Это как здесь уже был цЫрк со static , один клоун "обнаружил" и все нубы стали лепить где не поподя.
Так же и с DWT...
Частотомер здесь уже неоднократнь всплывал, простой и весьма действенный. Искать по Reciprocal counter...
Re: Тахометр на STM32F103
Вс окт 07, 2018 22:00:26
Речь именно об измерении времени (ТС еще про RTC писал), а не о режиме захвата таймера. С ним все понятно.dosikus писал(а):На таймере все получится аппаратно
"Бесплатный" 32-ух битный счетчик. Для задержек или измерения интервалов времени то что нужно. Ведь не у всех МК по 14 таймеров тем более 32-ух битных.dosikus писал(а):Так же и с DWT
У ТС STM32F103.dosikus писал(а):DWT в некоторых камнях просто нет.
Да частотомер был. Из того что помню, Олег выкладывал проект в теме которую по милости ARV снесли в ММЯЯЯЯЯЯЯЯЯЯЯЯЯЯУУ.
Re: Тахометр на STM32F103
Пн окт 08, 2018 07:44:25
частотомер обычный, если измерения раз в секунду, может считать до 1 Гц - это 60 об/мин минимум.
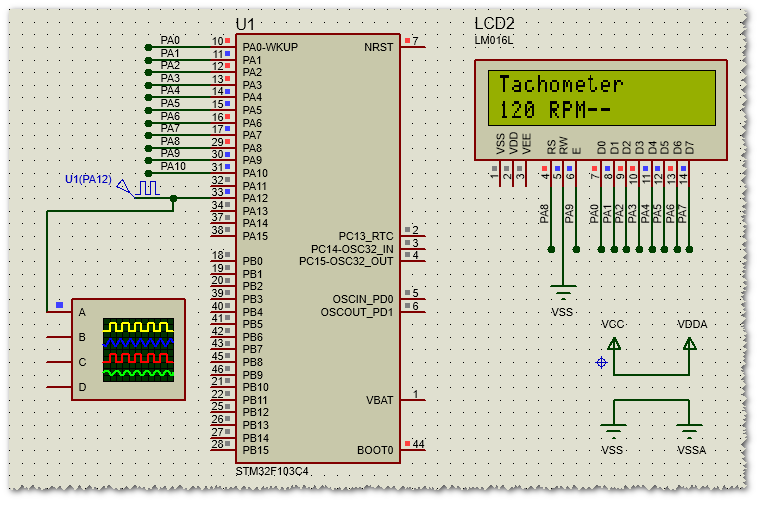
Попробовал упомянутый частотомер в протеусе - умножил частоту на 60, на входе 2 Гц:
Попробовал упомянутый частотомер в протеусе - умножил частоту на 60, на входе 2 Гц:
Re: Тахометр на STM32F103
Вт окт 09, 2018 14:50:05
не надо никаких калокубов и халов использовать. Если так чешется говнолибы юзать, то хотя бы слой LL юзайте как вы это любите.
Этот вечный спор HAL vs SPL. Кому то удобнее\нравится\хочется\необходимо\ и т.д. использует HAL. Кто то SPL. Этот спор не приведёт ни к чему хорошему. Зато решить вопрос точно не поможет. Уверен есть масса тем на разных ресурсах где можно это выяснять. Предлагаю не превращать эту тему в выяснение что лучше\круче\правильнее\и т д.
Попробовал сделать тахометр при помощи таймера с режимом захвата и настроенного для датчика холла

Выход с датчика холла подключил к выводу PA15. Датчик холла при отсутствии по близости магнита держит "1", при поднесении магнита выставляет "0".
Вкладку тактирования не трогал, оставил всё как предложил cubeMX

Таймер настроил таким образом что бы происходили прерывания каждые 10 ms. Если я конечно правильно понял как настроить таймер

Отчаявшись включил все прерывания


В файле main.c сделал такую функцию для подсчета оборотов:
- Код:
//----------
static void calculateRpm(void)
{
rpm = 60/(timeLastSignal[0] - time);
time = timeLastSignal[0];
}
Вывожу значение rpm на дисплей 2004 по I2C, запускаю таймер:
- Код:
/* USER CODE BEGIN 2 */
HAL_TIM_IC_Init(&htim2);
char str[4];
lcd_init(ADDR_DEV_LCD);
LCD_ON;
LCD_CURSOR_OFF;
HAL_TIM_Base_Start_IT(&htim2);
if(FLAG_HARD_FAULT == -1)
{
lcd_put_string_LRC(2, 0, "Hard Fault");
HAL_Delay(2500);
lcd_clear();
}
lcd_put_string_LRC(2, 0, "Тахометр v 1.0");
//lcd_put_string_LRC(2, 1, "Обороты:");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
calculateRpm();
sprintf(str, "%d", rpm);
lcd_put_string_LRC(2, 1, str);
HAL_Delay(50);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
В файле stm32f1xx_it.c в обработчике прерывания моего таймера пытаюсь захватить значение двумя способами:
- Код:
/**
* @brief This function handles TIM2 global interrupt.
*/
void TIM2_IRQHandler(void)
{
/* USER CODE BEGIN TIM2_IRQn 0 */
int b1 = 0;
int b2 = 0;
/*HAL_TIM_IC_Start(&htim2,TIM_CHANNEL_4);
timeLastSignal[0] = TIM2->CCR4;
HAL_TIM_IC_Stop(&htim2,TIM_CHANNEL_4);*/
HAL_TIM_IC_Start_DMA(&htim2,TIM_CHANNEL_4, timeLastSignal, 1);
b1 = TIM2->CCR1;
b2 = TIM2->CCR4;
/*if(timeLastSignal[0] == 0)
{
timeLastSignal[0] = 1;
}*/
HAL_TIM_IC_Stop_DMA(&htim2,TIM_CHANNEL_4);
//timeLastSignal = TIM2->CCR1;
/* USER CODE END TIM2_IRQn 0 */
HAL_TIM_IRQHandler(&htim2);
/* USER CODE BEGIN TIM2_IRQn 1 */
/* USER CODE END TIM2_IRQn 1 */
}
Но и в b1 и в b2 и в timeLastSignal[0] всегда ноль. В это прерывание попадаю как только подношу магнит к датчику. Т.е. можно предположить что таймер настроен правильно для датчика холла. Понятно что допустил ошибку , но вот где?
Re: Тахометр на STM32F103
Вт окт 09, 2018 15:39:59
Этот вечный спор HAL vs SPL. Кому то удобнее\нравится\хочется\необходимо\ и т.д. использует HAL. Кто то SPL. Этот спор не приведёт ни к чему хорошему. Зато решить вопрос точно не поможет. Уверен есть масса тем на разных ресурсах где можно это выяснять. Предлагаю не превращать эту тему в выяснение что лучше\круче\правильнее\и т д.
Это не "вечный спор" это абсолютная истина - калокуб и спл для нубов противопоказаны.
Вы на своем опыте уже убедились что и калокуб и спл для вас бЭсполезны.
Хотите вечно тыркаться, продолжайте...
Re: Тахометр на STM32F103
Вт окт 09, 2018 19:34:38
Ежли ужшш....
Тахометр в определенных пределах измеряемого диапазона единиц можно НА ЛЮБОМ МК (а то и просто на "рассыпухе") соорудить.

Вопрос в том, чего под лапой имеется и с чем работать умеешш.

Тахометр в определенных пределах измеряемого диапазона единиц можно НА ЛЮБОМ МК (а то и просто на "рассыпухе") соорудить.
Вопрос в том, чего под лапой имеется и с чем работать умеешш.
Re: Тахометр на STM32F103
Ср окт 10, 2018 04:28:06
Ежли ужшш....
Тахометр в определенных пределах измеряемого диапазона единиц можно НА ЛЮБОМ МК (а то и просто на "рассыпухе") соорудить.
Вопрос в том, чего под лапой имеется и с чем работать умеешш.
Тахометр в определенных пределах измеряемого диапазона единиц можно НА ЛЮБОМ МК (а то и просто на "рассыпухе") соорудить.
Вопрос в том, чего под лапой имеется и с чем работать умеешш.
На STM32F103 и датчике холла хочу