Re: Линейный двигатель
Ср май 11, 2011 22:45:35
Буду ждать с нетерпением новых новостей.
У самого уже терпения не хватает дождаться своей "заказухи".
Если есть возможность, выкладывайте фото или хотя бы чертежи.
Оно будет и наглядней и будет возможность подправить, если что.
У самого уже терпения не хватает дождаться своей "заказухи".
Если есть возможность, выкладывайте фото или хотя бы чертежи.
Оно будет и наглядней и будет возможность подправить, если что.
Re: Линейный двигатель
Чт июн 16, 2011 07:24:19
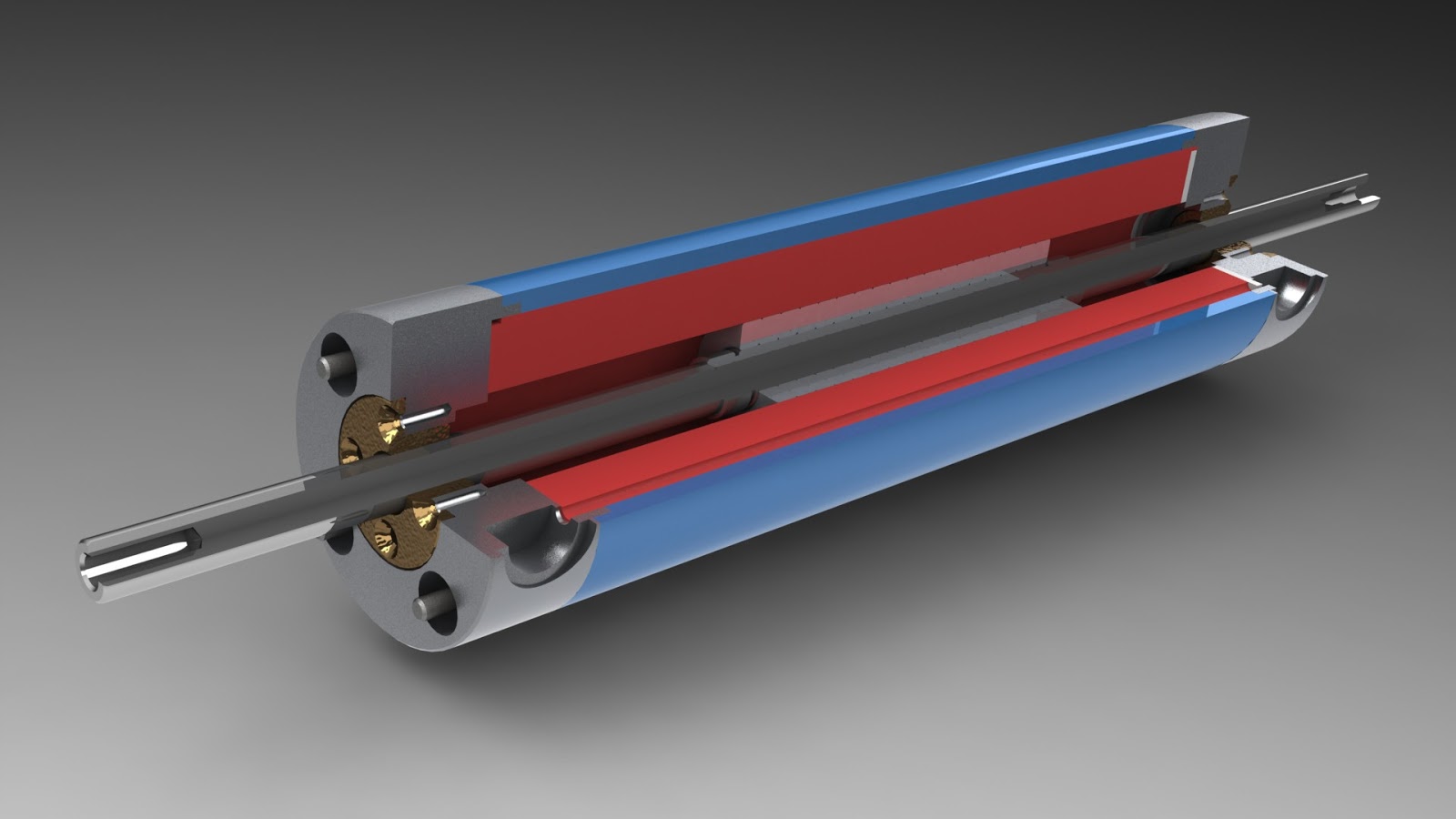
Вот такая у меня конструкция
http://1.bp.blogspot.com/-UxhgvPSBxac/T ... _motor.JPG
До токаря никак не доеду (((
Думаю на днях с обмоткой поэкспериментировать. Ток подобрать и померить усилие возникающее между магнитом и обмоткой (1 обмотка + 1 магнит).
http://1.bp.blogspot.com/-UxhgvPSBxac/T ... _motor.JPG
{kind=link}
До токаря никак не доеду (((
Думаю на днях с обмоткой поэкспериментировать. Ток подобрать и померить усилие возникающее между магнитом и обмоткой (1 обмотка + 1 магнит).
Re: Линейный двигатель
Вт июн 21, 2011 22:59:39
Вчера наконец-то пришел заказанный еще весной стержень.
Сильные магниты, таких еще не видел нигде.
И по закону подлости сейчас очень напряжно со свободным временем...
Сильные магниты, таких еще не видел нигде.
И по закону подлости сейчас очень напряжно со свободным временем...
Re: Линейный двигатель
Чт июн 23, 2011 10:13:23
У меня тоже очень сильные, кажется неодим-железо-бор (поднимаю ими микроволновку ))) )
Передал чертежи на производство, пока жду реакцию.
С магнитом будьте очень осторожны, чрезвычайно хрупок (если неодим), страшно боится резких ударов. Я одно колечко расколол нечаяно. Игрался с магнитами как дитя, и два кольца с большого расстояния примагнитились, произошел удар. Раскололось как-то странно, не заметно. Т.е. оно не разлетается на куски как стекло, просто покрывается трещинами, а потом рассыпается.
В моем случае хорошо, что разбилось. Я заказывал 20, и тут до меня доперло, что правильнее сделать кратно трем (3 фазы). В результате переделал всё на 18 колец и кол-во обмоток тоже кратно 3-м.
Передал чертежи на производство, пока жду реакцию.
С магнитом будьте очень осторожны, чрезвычайно хрупок (если неодим), страшно боится резких ударов. Я одно колечко расколол нечаяно. Игрался с магнитами как дитя, и два кольца с большого расстояния примагнитились, произошел удар. Раскололось как-то странно, не заметно. Т.е. оно не разлетается на куски как стекло, просто покрывается трещинами, а потом рассыпается.
В моем случае хорошо, что разбилось. Я заказывал 20, и тут до меня доперло, что правильнее сделать кратно трем (3 фазы). В результате переделал всё на 18 колец и кол-во обмоток тоже кратно 3-м.
Re: Линейный двигатель
Сб июл 23, 2011 13:34:44
Пока появилось свободное время, накидал новую печатку:
По линейнику:
Когда стал проверять якорь и мои катушки, оказалось, что якорь мне сделали на милиметр толще. Попробую уменьшить внутренний диаметр катушек, если не получится, придется делать новые.
По линейнику:
Когда стал проверять якорь и мои катушки, оказалось, что якорь мне сделали на милиметр толще. Попробую уменьшить внутренний диаметр катушек, если не получится, придется делать новые.
Re: Линейный двигатель
Вт авг 09, 2011 22:32:47
Наконец-то все детали добыты. Последние пришлось с материнок выпаивать, т.к. в нашем городе достать простую логику в корпусе SMD не реально.
Заодно сегодня забрал катушки после "Расточки".
Получился вот такой вот "Стартер КИТ":
Двигатель: 6 полностью независимых катушек;
Якорь: 18 магнитов установленных встречно;
Адаптер: Полная опто и гальвано развязка по 485 интерфейсу;
Драйвер: 3 полных независимых моста;

Отдельно драйвер (получился чуть больше пачки сигарет):


Примерный набросок управляющей проги для ПК:

В дальнейшем буду её возможности наращивать, т.к. с каждым днем новых идей все больше и больше.
В общем осталось только малость прошу для драйвера дописать, и в путь....
З.Ы.: Буд рад всем замечаниям, предложениям....
Заодно сегодня забрал катушки после "Расточки".
Получился вот такой вот "Стартер КИТ":
Двигатель: 6 полностью независимых катушек;
Якорь: 18 магнитов установленных встречно;
Адаптер: Полная опто и гальвано развязка по 485 интерфейсу;
Драйвер: 3 полных независимых моста;
Отдельно драйвер (получился чуть больше пачки сигарет):
Примерный набросок управляющей проги для ПК:
В дальнейшем буду её возможности наращивать, т.к. с каждым днем новых идей все больше и больше.
В общем осталось только малость прошу для драйвера дописать, и в путь....
З.Ы.: Буд рад всем замечаниям, предложениям....
Re: Линейный двигатель
Сб авг 27, 2011 00:21:13
Ух-ты!
Сто лет не заходил, рад материализации идей
Могу только поздравить и ждать продолжения истории.
Выглядит интерресно, мне пока не все понятно, т.е. есть вопросы:
- сможет ли якорь обеспечивать нагрузку (хрупкий?)
- насколько удобно крепить исполнительные механизмы к якорю и сам двигатель?
Теперь до меня дошло основное отличие между этой системой и моей.
У меня на лицо жесткое ограничение хода, тут же все намного проще в этом плане.
По поводу управления есть мысли протянуть параллели между звуковыми колебаниями и колебаниями якоря
Возможно так будет проще.
Ну... смотря под какие задачи конечно.
Очень интересно узнать какую нагрузку эта система смогла "потянуть".
Сто лет не заходил, рад материализации идей
Могу только поздравить и ждать продолжения истории.
Выглядит интерресно, мне пока не все понятно, т.е. есть вопросы:
- сможет ли якорь обеспечивать нагрузку (хрупкий?)
- насколько удобно крепить исполнительные механизмы к якорю и сам двигатель?
Теперь до меня дошло основное отличие между этой системой и моей.
У меня на лицо жесткое ограничение хода, тут же все намного проще в этом плане.
По поводу управления есть мысли протянуть параллели между звуковыми колебаниями и колебаниями якоря
Возможно так будет проще.
Ну... смотря под какие задачи конечно.
Очень интересно узнать какую нагрузку эта система смогла "потянуть".
Re: Линейный двигатель
Сб авг 27, 2011 08:01:45
Seliverstoff писал(а):Выглядит интерресно, мне пока не все понятно, т.е. есть вопросы:
- сможет ли якорь обеспечивать нагрузку (хрупкий?)
- насколько удобно крепить исполнительные механизмы к якорю и сам двигатель?
- Сможет. Внешняя оболочка здорово в этом плане выручает.
- Сам двигатель крепить не проблема. А вот с якорем малость промахнулся, совсем забыл про этот момент при заказе.
Сейчас планирую в торце просверлить отверстие, нарезать резьбу, и ввинчивать то что нужно.
Seliverstoff писал(а):По поводу управления есть мысли протянуть параллели между звуковыми колебаниями и колебаниями якоря
Возможно так будет проще.
Ну... смотря под какие задачи конечно.
Очень интересно узнать какую нагрузку эта система смогла "потянуть".
С трудом представляю аналогии между звуковыми колебаниями и этим двигателем. Тум в самый раз аналогии с BLDC, ну или с шаговиками на худой конец.
Силу замерить пока никак (якорь еще не переделан), но при токах в 1 ампер, и подключенных 3 катушках (половина) - усилие отличное! Рукой тяжело двигать.
Вчера после долгих мучений с микрошагами перешл на полушаговый режими. Он как и при рассчетах получился ~ 2 мм.
С плавными перемещениями пока придется обождать. По крайней мере до появления подшипников или датчиков.
Re: Линейный двигатель
Сб авг 27, 2011 09:42:02
Принимайте мои искренние поздравления! 
Теперь буду знать с кем, при случае, можно проконсультироваться
Теперь буду знать с кем, при случае, можно проконсультироваться
Re: Линейный двигатель
Сб авг 27, 2011 22:25:40
Рано еще поздравляться.
Можно сказать что положено крепкое основание длинной череде опытов и экспериментов.
Вот когда получится установка, работающая абсолютно четко и предсказуемо, когда будут выяснены все тонкости и нюансы, вот тогда да...
Кстати имеется вопрос:
Представим что у нас есть шаговый двигатель с датчиком положения.
Двигатель работает в микрошаговом режиме, датчик отслеживает угол поворота якоря.
Теперь представим такую ситуацию: в какой то момент на двигатель повесили дополнительную нагрузку,
и он не смог провернуться на очередной микрошаг, датчик это отследил, дал команду контроллеру.
Но что в этом случае делать контроллеру?
Поднимать ток в обмотках, пока не провернется якорь или попытаться шагнуть дальше? Или...?
Подскажите, кто что может.
Можно сказать что положено крепкое основание длинной череде опытов и экспериментов.
Вот когда получится установка, работающая абсолютно четко и предсказуемо, когда будут выяснены все тонкости и нюансы, вот тогда да...
Кстати имеется вопрос:
Представим что у нас есть шаговый двигатель с датчиком положения.
Двигатель работает в микрошаговом режиме, датчик отслеживает угол поворота якоря.
Теперь представим такую ситуацию: в какой то момент на двигатель повесили дополнительную нагрузку,
и он не смог провернуться на очередной микрошаг, датчик это отследил, дал команду контроллеру.
Но что в этом случае делать контроллеру?
Поднимать ток в обмотках, пока не провернется якорь или попытаться шагнуть дальше? Или...?
Подскажите, кто что может.
Re: Линейный двигатель
Сб авг 27, 2011 23:05:11
DimanVIP писал(а):Кстати имеется вопрос:
...Теперь представим такую ситуацию: в какой то момент на двигатель повесили дополнительную нагрузку,
и он не смог провернуться на очередной микрошаг, датчик это отследил, дал команду контроллеру.
Но что в этом случае делать контроллеру?
Поднимать ток в обмотках, пока не провернется якорь или попытаться шагнуть дальше?
По моему, правильнее при "зафиксированном положении", поднять ток обмотки.
Исполнение следующего шага, приведет к тому что увеличится "разрыв" между текущим положением и "планируемым".
Re: Линейный двигатель
Сб авг 27, 2011 23:15:52
Meteor писал(а):Исполнение следующего шага, приведет к тому что увеличится "разрыв" между текущим положением и "планируемым".
Да и то не факт что он его сделает. Так что, похоже, симметричное поднятие токов в обмотках - единственное верное решение.
Re: Линейный двигатель
Сб авг 27, 2011 23:27:45
DimanVIP писал(а):Да и то не факт что он его сделает.
Я к тому и вел, разрыв больше - больше требуется ток для шага
Re: Линейный двигатель
Чт дек 08, 2011 02:29:28
У меня есть немного новостей.
Наконец-то все выточено и можно заниматься продолжением проекта. Чуть позже выложу фотки.
Пока собрал сердечник. Магниты разворачивал одноименными полюсами друг к другу. Все магниты как колечки. Когда надел колечки на шток получилась огромная магнитная пружина, еле сжал ))) Проверил распределение полей, все как надо - чередуются. Если двигать кончик отвертки вдоль сердечника, то она прилипает дискретно.
Задумался об обмотках....
Хочется залить их компаундом который одновременно бы работал и как сердечник трансформатора, чтобы снизить токи на холостых позициях.
У меня чуть иная схема привода, статор больше по длине чем магнитный сердечник и есть позиции когда обмотки работают без сердечника. Хотелось бы это компенсировать за счет оболочки обмоток.
Существуют такие компаунды или это мои фантазии?
Какие у вас новости? Что происходит? Очень интересно!
Наконец-то все выточено и можно заниматься продолжением проекта. Чуть позже выложу фотки.
Пока собрал сердечник. Магниты разворачивал одноименными полюсами друг к другу. Все магниты как колечки. Когда надел колечки на шток получилась огромная магнитная пружина, еле сжал ))) Проверил распределение полей, все как надо - чередуются. Если двигать кончик отвертки вдоль сердечника, то она прилипает дискретно.
Задумался об обмотках....
Хочется залить их компаундом который одновременно бы работал и как сердечник трансформатора, чтобы снизить токи на холостых позициях.
У меня чуть иная схема привода, статор больше по длине чем магнитный сердечник и есть позиции когда обмотки работают без сердечника. Хотелось бы это компенсировать за счет оболочки обмоток.
Существуют такие компаунды или это мои фантазии?
Какие у вас новости? Что происходит? Очень интересно!
Re: Линейный двигатель
Чт дек 08, 2011 08:05:28
Заканчиваю рисовать новый драйвер на АРМе.
А то в старом имелись косяки, да и некуда было подключать датчики, и вычислительной мощи уже не хватит.
Времени проекту уделяется крайне мало, но думаю на следующей неделе приступить уже к изготовлению.
Да и надо заранее подыскать подходящие датчики, в качестве концевиков и в качестве измерителей положения.
А то в старом имелись косяки, да и некуда было подключать датчики, и вычислительной мощи уже не хватит.
Времени проекту уделяется крайне мало, но думаю на следующей неделе приступить уже к изготовлению.
Да и надо заранее подыскать подходящие датчики, в качестве концевиков и в качестве измерителей положения.
Re: Линейный двигатель
Чт дек 08, 2011 08:07:41
DimanVIP писал(а):Теперь представим такую ситуацию: в какой то момент на двигатель повесили дополнительную нагрузку, и он не смог провернуться на очередной микрошаг, датчик это отследил, дал команду контроллеру.
Но что в этом случае делать контроллеру?
Поднимать ток в обмотках, пока не провернется якорь или попытаться шагнуть дальше? Или...?
Подскажите, кто что может.
Надо промаркировать всю линию движения , чтобы система могла знать - где находится шток, а где точка заданного положения. Кроме того надо внести в систему датчик предельного тока и счетчик предельного числа попыток при ударной нагрузке (т.е. при закусывании движущихся частей системы). Тогда при резком повышении нагрузки система выполнит несколько попыток сдвинуть вад двигателя на повышенном токе. После этого можно попробовать двигаться в обратную сторону (а можно и отключить движение с кодом ошибки "механический останов. привода"), после чего включать "стоп системы по перегрузу".
Это общая концепция, но такие системы имеются и работают.
Re: Линейный двигатель
Чт дек 08, 2011 21:22:08
Пока платка выглядит так:


Вариант, конечно, не окончательный, но близок к завершению. Деталек стало еще больше (на 2 корпуса логики, не считая мелочи), но размер платы только уменьшился. Но самое главное, воплотил давнюю задумку - сплошной радиатор на одной из сторон.
Если считать что датчики токов и все необходимые счетчики у нас уже имеются, то остается только решить вопрос с датчиками положения.
У кого какие будут предложения?
Я пока взял для экспериментов Холла.
Вариант, конечно, не окончательный, но близок к завершению. Деталек стало еще больше (на 2 корпуса логики, не считая мелочи), но размер платы только уменьшился. Но самое главное, воплотил давнюю задумку - сплошной радиатор на одной из сторон.
rojan писал(а):Надо промаркировать всю линию движения , чтобы система могла знать - где находится шток, а где точка заданного положения. Кроме того надо внести в систему датчик предельного тока и счетчик предельного числа попыток при ударной нагрузке (т.е. при закусывании движущихся частей системы).
Если считать что датчики токов и все необходимые счетчики у нас уже имеются, то остается только решить вопрос с датчиками положения.
У кого какие будут предложения?
Я пока взял для экспериментов Холла.
Re: Линейный двигатель
Чт дек 08, 2011 22:31:33
DimanVIP писал(а):остается только решить вопрос с датчиками положения.
У кого какие будут предложения?
Я пока взял для экспериментов Холла.
А более конкретные условия эксплуатации оговорить можно?
Например если не требуется "запоминания" или привязки то можно считать импульсы, а если нужно "точно отпозиционировать и привязать", то датчики Холла тут не помощники. Длину хода тоже не мешало бы знать.
Re: Линейный двигатель
Чт дек 08, 2011 23:17:55
Возьмем самые сложные условия.
Требуется и точное позиционирование и привязка.
Датчики Холла у меня ни разу не цифровые. Наши совдеповские ДХК-05П-2.
На выходе у них как раз то что нужно - аналоговый сигнал.
Осталось к ним собрать усилитель, подключить к АЦП и будем иметь довольно точное положение.
Провел небольшое испытание: без усилителя сел на выход датчика вольтметром, и двигал рядышком (около 1 см) якорем.
Показания(ток 6мА): +-11мВ, в зависимости от полюса магнита.
Так что по крайней мере шаги будут различаться точно.
В дополнение нужно будет добавить концевики на крайние положения, они будут нужны, как минимум, при включении системы.
Буду рад выслушать критику, замечания, предложения.
Требуется и точное позиционирование и привязка.
Датчики Холла у меня ни разу не цифровые. Наши совдеповские ДХК-05П-2.
На выходе у них как раз то что нужно - аналоговый сигнал.
Осталось к ним собрать усилитель, подключить к АЦП и будем иметь довольно точное положение.
Провел небольшое испытание: без усилителя сел на выход датчика вольтметром, и двигал рядышком (около 1 см) якорем.
Показания(ток 6мА): +-11мВ, в зависимости от полюса магнита.
Так что по крайней мере шаги будут различаться точно.
В дополнение нужно будет добавить концевики на крайние положения, они будут нужны, как минимум, при включении системы.
Буду рад выслушать критику, замечания, предложения.
Re: Линейный двигатель
Чт дек 08, 2011 23:30:45
Meteor писал(а):А более конкретные условия эксплуатации оговорить можно?
Сейчас ориентировочные условия эксплуатации следующие:
Точность хода - 1 мм
Тяговое усилие - до 2 кг
Длина хода - 100 мм
Скорость - до 10 раз в сек