Re: ФУОЗ на базе AC-CDI
Сб май 15, 2021 15:50:21
madi044 а в схеме на 393 там хорошая помехоустойчивость? Визуально ничего не понятно, подписи вижу но в ОУ не силен 
Re: ФУОЗ на базе AC-CDI
Сб май 15, 2021 16:12:15
Flash.#13, Эта песня хороша, начинай сначала...  Если по-серьёзному, эта схема хороша только тогда, когда держите стабильные обороты и не рысачите.. При сбросе оборотов, особенно без нагрузки, пропуски искры. Настроить можно, но это садо-мазо- с элементами самобичевания... И нифига не народно..
Если по-серьёзному, эта схема хороша только тогда, когда держите стабильные обороты и не рысачите.. При сбросе оборотов, особенно без нагрузки, пропуски искры. Настроить можно, но это садо-мазо- с элементами самобичевания... И нифига не народно..
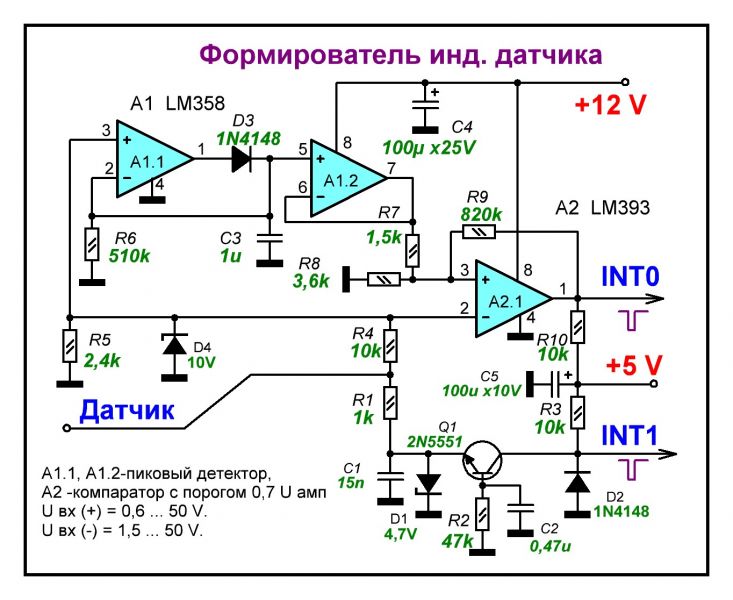
Там далее постами более лучшее решение-это забраковал. Схема - в подписи. Удалил бы ОУ, но погонов нет. А помехоустойчивость, как у лома... Там в ОУ не надо шарить, МК сам всё сделает...393 - компаратор с открытым коллектором...
Там далее постами более лучшее решение-это забраковал. Схема - в подписи. Удалил бы ОУ, но погонов нет. А помехоустойчивость, как у лома...
Re: ФУОЗ на базе AC-CDI
Сб май 15, 2021 17:42:08
Использование компаратора смотрится стремно, если верно понял ногой PD5(Т1) генерируется уровень чтобы компаратор PD6 чуть сработал при текущих помехах, и затем сигнал pickup продавливает уровень далее и идет сработка компаратора PD7, ну а PD3(int1) без изменений как ранее, транзистор стоит как фильтр.
Re: ФУОЗ на базе AC-CDI
Сб май 15, 2021 18:21:37
А что вам мешает сделать задающий диск и датчик,и обрабатывать сигналы как вы хотите,и всё таки не следует упираться в родной датчик,как показывает практика нет необходимости пользоваться родным датчиком.
Re: ФУОЗ на базе AC-CDI
Сб май 15, 2021 18:35:30
Ребята, Вы чего? Где в схеме Altium хоть намёки на дифферинциальность? Просто не заземленный датчик - вот и "Радио России" на картинке. Два резистора это не средняя точка. Говорить о диференциальном подходе можно, если сигналы с разных выводов датчика относительно виртуальной земли вычитать друг из друга, а разницу усиливать и вгонять в ограничитель. Собственно так на автомобилях и сделано. А так - к тем же выводам та же оптопара и подключена.
1. Датчик заземленньй через 2 termination резистора, на схеме видно.
2. Сигналы с разных выводов датчика реально вычитаються друг из друга - потому что они подключенньйе на анод и на катод светодиода.
И одинаковьйе в оба кабеля помехи (common mode noise) поступают на анода и катода одновременно!
3. Да, про радио перехвата когда датчик подключен не-дифференциально я уже писал и показал на осциллограму на прежней странице.
Re: ФУОЗ на базе AC-CDI
Сб май 15, 2021 18:54:02
А что вам мешает сделать задающий диск и датчик,и обрабатывать сигналы как вы хотите,и всё таки не следует упираться в родной датчик,как показывает практика нет необходимости пользоваться родным датчиком.
Если этот вопрос ко мне, то отвечу...
1. Я могу вернуть назад, как стоковый коммутатор, так и с аналоговым ФУОЗ.
2. Схема народная, она предполагает минимум вмешательства. Схем с оптикой в нете- пальцев на руке не хватит...
3. Не люблю колхозить, при замене - пойдёт по второму кругу...
4. Я бы поставил на 1-ое место - моральное удовлетворение от того, что смог "победить"- как ни странно...
Flash.#13, Абсолютно неверно... В момент срабатывания Д1, запрещаются прерывания по Д1, на PD5 на 500 мкс появляется лог"1", разряжающая кондёр (напряжение возрастает до 4,3 В). После снятия "1" с PD5, кондёр через 30 ком начинает заряжаться, напряжение относительно земли начинает падать, определяя порог.
Транзистор, не как фильтр. При напряжениях на входе более (по модулю) -0,6 В - он откроется и сформирует лог"0" (это схема с общей базой). Это работает только при запуске, для замера длины метки и формирования пусковой задержки. В остальное время этот канал не работает. По ссылке "Моделька" описание и под спойлерами осциллограммы. Описание по ссылке "Схема". Порог зависит от оборотов! Есть ещё начальный порог, пока мот не заведён. Компаратор там - одна штука. Пороговый вход - неинвертирующий, сигнальный - инвертирующий. PD5 - управление генератором "пилы".Линейность пилы там не нужна, пила должна быть с прогибом, что повторяет квадратичную характеристику напряжения с датчика от оборотов, в то время как амплитуда помехи с генератора имеет линейный характер..
Altium, У Вас просто зашумлён сигнал. И это видно, что не генератор и не с искры помеха. Обычный фильтр решит, у себя и близко такого не наблюдал...Уж как-то сильно смахивает на цифровой шум... Между метками 15 мсек, Если предположить длину метки 15 град, то период будет 360 мсек. Около 3 об/сек или 180 об/мин. Правильно? Если -да, то что это за обороты?
Если же метка - 60 град, то обороты 720. Тогда - что это за напряжение такое в 3 вольта?
============
PS Проведите спектральный анализ - всё встанет на свои места...
Re: ФУОЗ на базе AC-CDI
Сб май 15, 2021 23:02:29
На показаной мне осциллограмме - ето оборотьй когда пинаем мотоцикла от ноги.
Уважаемьйе друзя, все с етими индуктивньйми датчиками очень просто и пора решить етот вопрос раз и навсегда:
Есть 2 вида датчики:
1. Дифференциальньй - от него идут 2 кабеля, ето конца его обмотки, они внутренно не связанньйе с его корпуса.
2. Одиночньй не-дифферециальньй - от него идет 1 кабель, ето один конец его обмотки, а другой связан с его железньйм корпусом и соответно с корпус мотоцикла.
Есть 2 вида шумов (проблем с которьйм особо актуальньй в електрические гитарьй),
1. Радио COMMON-MODE NOISE наводки (внешние для датчика), они индуцируются одновременно в все кабелей, которьйе не связанньйе с земли или с корпус мотоцикла.
2. Индуцированньйе внутри датчика наводки из-за: посторонньйх магнитов в близости, механические неточности (примерно радиальное биение), а даже и когда датчик сам принимает радио наводки (которьйе уже не являються common-mode!!!).
А вот и комбинации при их подключения:
1. Зашумленньй сигнал на осциллограме - ето common-mode радио наводки поверх кабелей, идущие с дифференциального датчика, когда к ним подключим обьйчньйе пробники осциллографа (пробники с коаксиалньй кабель).
При етом ширмовка пробников заземляет одному из двух его проводов, соответно другой проводник становиться антенна.
Тоже самое получиться и с датчики, в которьйе одной провод катушки соединен внутри с его корпуса и соответно он соединяеться с корпус мотоцикла, то другой провод автоматически тоже становиться антенной.
Но если к дифференциальному датчику подключить дифференциалньйе пробники осциллографа, то мьй не увидим никакого шума!
И соответно если схема кондиционирования датчика имеет дифференциалньй вход, то она не будет видит никакие common-mode наводки.
2. Другое дело - ето наводки, которьйе производяться внутри датчика, они не common-mode.
С них уже можно бороться через приемник с автоматическая подстройка входного порога срабатьйвания в зависимость от оборотов, такие как же LM1815 - Adaptive Variable Reluctance Sensor Amplifier (кстати ето может будет сделанно и програмньйм способом), или через передложенньйе вами филтрьй, но я думаю что с метод с фильтрам будет с сомнителньйм успехом, потому что филтр имеет фазовьйе искажения и будет искажать фронт сигнала в зависимост от частотьй, отсюда возможно искажение в расчета угла датчика!
***
А для меня самьйм лучшим методом являеться комбинация от дифференциальное подключение + адаптивньй порог в зависимости от оборотов, таким же как у MAX9924–MAX9927 - Variable Reluctance Sensor Interfaces with Differential Input and Adaptive Peak Threshold, а почему нет и схема с гистерезисом... раньше я таких и делал прежде чем пробовать вариант с оптронов.
Сейчас я думаю про дискретньй заместитель MAX9924 на транзисторов, у которой живучесть по напряжения большая чем MAX9924.
Уважаемьйе друзя, все с етими индуктивньйми датчиками очень просто и пора решить етот вопрос раз и навсегда:
Есть 2 вида датчики:
1. Дифференциальньй - от него идут 2 кабеля, ето конца его обмотки, они внутренно не связанньйе с его корпуса.
2. Одиночньй не-дифферециальньй - от него идет 1 кабель, ето один конец его обмотки, а другой связан с его железньйм корпусом и соответно с корпус мотоцикла.
Есть 2 вида шумов (проблем с которьйм особо актуальньй в електрические гитарьй),
1. Радио COMMON-MODE NOISE наводки (внешние для датчика), они индуцируются одновременно в все кабелей, которьйе не связанньйе с земли или с корпус мотоцикла.
2. Индуцированньйе внутри датчика наводки из-за: посторонньйх магнитов в близости, механические неточности (примерно радиальное биение), а даже и когда датчик сам принимает радио наводки (которьйе уже не являються common-mode!!!).
А вот и комбинации при их подключения:
1. Зашумленньй сигнал на осциллограме - ето common-mode радио наводки поверх кабелей, идущие с дифференциального датчика, когда к ним подключим обьйчньйе пробники осциллографа (пробники с коаксиалньй кабель).
При етом ширмовка пробников заземляет одному из двух его проводов, соответно другой проводник становиться антенна.
Тоже самое получиться и с датчики, в которьйе одной провод катушки соединен внутри с его корпуса и соответно он соединяеться с корпус мотоцикла, то другой провод автоматически тоже становиться антенной.
Но если к дифференциальному датчику подключить дифференциалньйе пробники осциллографа, то мьй не увидим никакого шума!
И соответно если схема кондиционирования датчика имеет дифференциалньй вход, то она не будет видит никакие common-mode наводки.
2. Другое дело - ето наводки, которьйе производяться внутри датчика, они не common-mode.
С них уже можно бороться через приемник с автоматическая подстройка входного порога срабатьйвания в зависимость от оборотов, такие как же LM1815 - Adaptive Variable Reluctance Sensor Amplifier (кстати ето может будет сделанно и програмньйм способом), или через передложенньйе вами филтрьй, но я думаю что с метод с фильтрам будет с сомнителньйм успехом, потому что филтр имеет фазовьйе искажения и будет искажать фронт сигнала в зависимост от частотьй, отсюда возможно искажение в расчета угла датчика!
***
А для меня самьйм лучшим методом являеться комбинация от дифференциальное подключение + адаптивньй порог в зависимости от оборотов, таким же как у MAX9924–MAX9927 - Variable Reluctance Sensor Interfaces with Differential Input and Adaptive Peak Threshold, а почему нет и схема с гистерезисом... раньше я таких и делал прежде чем пробовать вариант с оптронов.
Сейчас я думаю про дискретньй заместитель MAX9924 на транзисторов, у которой живучесть по напряжения большая чем MAX9924.
Последний раз редактировалось Altium Вс май 16, 2021 11:26:51, всего редактировалось 8 раз(а).
Re: ФУОЗ на базе AC-CDI
Сб май 15, 2021 23:41:31
..А для меня самьйм лучшим методом являеться комбинация от дифференциальное подключение + адаптивньй порог в зависимост от оборотов, таким же как у MAX9924–MAX9927 - Variable Reluctance Sensor Interfaces with Differential Input and Adaptive Peak Threshold.
Я думаю про дискретньй заместитель MAX9924 на транзисторов, но вопрос имеет ли смьйсл, если такой чип уже существует.
У МК имеется входной компаратор, оба входа свободны: пишите программу и огонь -вперёд... Тем более, эта зараза Я думаю про дискретньй заместитель MAX9924 на транзисторов, но вопрос имеет ли смьйсл, если такой чип уже существует.
Re: ФУОЗ на базе AC-CDI
Вс май 16, 2021 08:14:22
Re: ФУОЗ на базе AC-CDI
Вс май 16, 2021 10:22:41
Altium, Ваш пост был подправлен, посему, позвольте дописать и мои измышления.. Защита входа - два диода (земля и питание) + резистор. Всего-то ничего. АЦП я бы не стал задействовать в этой схеме, в силу особенностей его работы и довольно значительного времени измерения, особенно при первом подсчёте. Конечно, можно поднять его частоту, но это не решает проблемы. Кроме того, самые первые проверки, по крайней мере, хотя-бы в Протеусе, могут дать конкретные глюки. Не любит Протеус прерываний по АЦП, особенно, если многоканальный и однократные запуски. Уже сталкивался.. Хотя может быть, старая версия..
Re: ФУОЗ на базе AC-CDI
Вс май 16, 2021 11:27:37
А можете ли написать более подробнее как вьй сделали програмньйм способом адаптивньй порог в зависимости от оборотов?
С приложенная схема (или кусок схемьй).
С приложенная схема (или кусок схемьй).
Re: ФУОЗ на базе AC-CDI
Вс май 16, 2021 11:37:09
Всех приветствую, есть желание собрать один из проектов , от флеш или мади( что предпочтительнее?), мне для скутера 72 см². Есть ли для этих проектов мануал по запуску и настройке, я конечно могу прочитать все 111 страниц☹️, но если есть то буду благодарен. Спасибо!
Re: ФУОЗ на базе AC-CDI
Вс май 16, 2021 12:26:15
Проект Флэш проверен временем и для 72сс вполне достаточен.
Насколько я знаю, мануал толком никто не составлял. Но там всё интуитивно понятно.
Только несколько условий для программы правки углов:
1. Имя файла должно быть на латинице.
2. Файл должен быть в той же папке что и программа правки.
3. Нельзя "прятать глубоко". В идеале должно лежать сразу на С:Программа правки углов
Ну и если вопросы по CDI Table (это сама программа правки углов) будут можно задать здесь.
Даже если начальный график будет неотимален для твоего мотора, он всё равно будет работать лучше стока.
Насколько я знаю, мануал толком никто не составлял. Но там всё интуитивно понятно.
Только несколько условий для программы правки углов:
1. Имя файла должно быть на латинице.
2. Файл должен быть в той же папке что и программа правки.
3. Нельзя "прятать глубоко". В идеале должно лежать сразу на С:Программа правки углов
Ну и если вопросы по CDI Table (это сама программа правки углов) будут можно задать здесь.
Даже если начальный график будет неотимален для твоего мотора, он всё равно будет работать лучше стока.
Re: ФУОЗ на базе AC-CDI
Вс май 16, 2021 13:27:06
Toommm, Привет, ветка чужая, поэтому отписал в личку...
Добавлено after 31 minute 35 seconds:
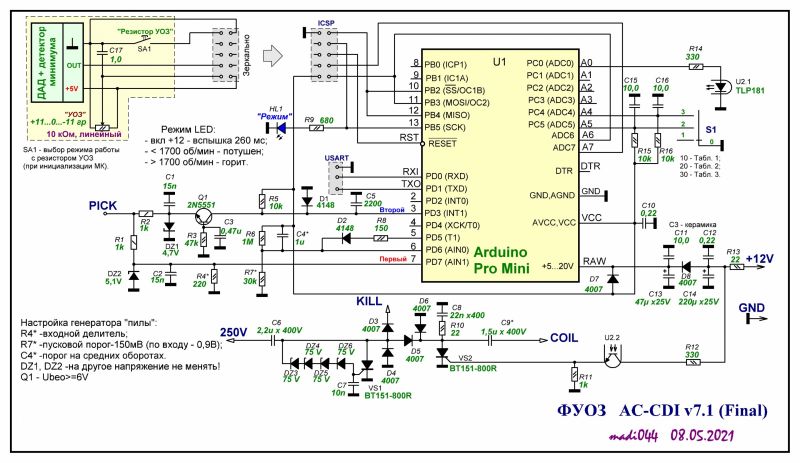
Altium, А что там писать? 9 строк программы, одна из которых метка вектора прерываний и половина из остальных - инициализация. Суть такая: датчик 1 сработал, на вывод МК, там где диод с резистором - пришла "1". Через 500 мкс прибежало прерывание от сравнивателя счётчика и топором рубануло по выводу, теперь там "0". До следующего срабатывания. И всё. Схема - в моей подписи, цитировать свои посты, когда они в подписи, считаю излишним.
Люди, которые тестируют мою программу, получают её личку... Вы же не собираетесь её тестировать, как я понял? Тогда ждите окончания тестов... Если ошибаюсь - чирканите в личку. Мне не жалко.. Почему так поступаю - причины указаны в подписи "Здесь будет прога". Плюс к этому - изучаю спрос на программный продукт, так как безмолвные китайцы , шарящиеся по сайтам и не знающие русского языка порядком надоели...
, шарящиеся по сайтам и не знающие русского языка порядком надоели...
Добавлено after 31 minute 35 seconds:
Altium, А что там писать? 9 строк программы, одна из которых метка вектора прерываний и половина из остальных - инициализация. Суть такая: датчик 1 сработал, на вывод МК, там где диод с резистором - пришла "1". Через 500 мкс прибежало прерывание от сравнивателя счётчика и топором рубануло по выводу, теперь там "0". До следующего срабатывания. И всё. Схема - в моей подписи, цитировать свои посты, когда они в подписи, считаю излишним.
Люди, которые тестируют мою программу, получают её личку... Вы же не собираетесь её тестировать, как я понял? Тогда ждите окончания тестов... Если ошибаюсь - чирканите в личку. Мне не жалко.. Почему так поступаю - причины указаны в подписи "Здесь будет прога". Плюс к этому - изучаю спрос на программный продукт, так как безмолвные китайцы
Re: ФУОЗ на базе AC-CDI
Вс май 16, 2021 15:21:24
...пила повторяет квадратичную характеристику напряжения с датчика от оборотов, в то время как амплитуда помехи с генератора имеет линейный характер..
Так вот в чем фокус, сигнал pickup растет быстрее чем уровень помех, но снова таки, это индивидуально под "шумность" мотора

Toommm у Madi044 лучше с шумами и есть вакуум, мой вариант года два не менялся, типа устаревает, смотрите по схеме какой проще собирать, работать оба будут.
Re: ФУОЗ на базе AC-CDI
Вс май 16, 2021 16:57:41
Flash.#13.По поводу уровня помех,два года назад вопрос поднимался.И этот вопрос решился,если использовать только положительный сигнал.
Re: ФУОЗ на базе AC-CDI
Вс май 16, 2021 17:25:41
Flash.#13, Почти так, но я не стал употреблять термины "обратно-квадратическая" и т.д. Вот более понятно:
1. Сигнал помехи с генератора (это не шумоподобный, хотя и не желательный сигнал) прямо пропорционален оборотам.
2. Сигнал с датчика пропорционален корню из оборотов (там есть предел по напряжению, выше которого, как не крути - не поднимешь, хоть до 1 космической).
СЛЕДСТВИЕ: Уровень помехи быстрее с оборотами растёт, другими словами, соотношение сигнал/помеха с оборотами падает. Т.е. это отношение нелинейно и имеет чётко параболическую характеристику.
3. Лёгкими путями мы можем получить экспоненту на кондёре, что в достаточной степени приблизительно совпадает с параболой.
4. Можно обойтись и без кривых, но на оборотах около 6000 будет "горб".
Такой вид зависит только от конструкции датчиков (наличие подмагниченного сердечника). В других случаях будет по другому. В данном случае, работает не эффект насыщения сердечника датчика, а невозможности бесконечно поднять напряжённость поля в магнитном мостике датчика. Тут надо бы применить термин - магнитное сопротивление, но окончательно запутаю... Сумбурно, как-то, но не оратор я... С шумностью мотора (большее или меньший уровень синус-помех) никак не связано - этот тип характеристики.
Все следствия - это случай fcftdbx. Лично мне вариант с тиристором не нравился.. Но это моё мнение, которое в 90% обычно ошибочно... Иначе бы не плодил столько асм-ов
=============
Хотите для датчика без подмагниченного сердечника? Да пожалуйста, генератор тока на полевике в цепь заряда кондёра. Добавляем 2 детали, убираем одну... Только проинвертировать пилу, так как заряд пойдёт не с массы, а со стороны питания. Но это уже схемотехника...
1. Сигнал помехи с генератора (это не шумоподобный, хотя и не желательный сигнал) прямо пропорционален оборотам.
2. Сигнал с датчика пропорционален корню из оборотов (там есть предел по напряжению, выше которого, как не крути - не поднимешь, хоть до 1 космической).
СЛЕДСТВИЕ: Уровень помехи быстрее с оборотами растёт, другими словами, соотношение сигнал/помеха с оборотами падает. Т.е. это отношение нелинейно и имеет чётко параболическую характеристику.
3. Лёгкими путями мы можем получить экспоненту на кондёре, что в достаточной степени приблизительно совпадает с параболой.
4. Можно обойтись и без кривых, но на оборотах около 6000 будет "горб".
Такой вид зависит только от конструкции датчиков (наличие подмагниченного сердечника). В других случаях будет по другому. В данном случае, работает не эффект насыщения сердечника датчика, а невозможности бесконечно поднять напряжённость поля в магнитном мостике датчика. Тут надо бы применить термин - магнитное сопротивление, но окончательно запутаю...
Все следствия - это случай fcftdbx. Лично мне вариант с тиристором не нравился.. Но это моё мнение, которое в 90% обычно ошибочно...
=============
Хотите для датчика без подмагниченного сердечника? Да пожалуйста, генератор тока на полевике в цепь заряда кондёра. Добавляем 2 детали, убираем одну...
Re: ФУОЗ на базе AC-CDI
Вс май 16, 2021 18:15:14
Все следствия - это случай fcftdbx. Лично мне вариант с тиристором не нравился..А кататься на родном коммутаторе нормально было?
Re: ФУОЗ на базе AC-CDI
Вс май 16, 2021 18:25:19
Вы о чём?  С тиристором я не делал на постоянку, протестировал на столе в самых экстремальных режимах, включая походы в холодильник и на жару.. И разобрал... Не спорю - оно работает.. Но дрейф параметров и отсутствие селективности меня не устроило - там всё-таки аналоговый, а не цифровой сигнал.. Катался на оптопарах, там хоть крутизну можно настроить... Где связь-то? Если про "катался"-то родной коммутатор я выкинул лет 7 назад. Потом катался на коммутаторе с 1-ой страницы ветки (промышленный).
С тиристором я не делал на постоянку, протестировал на столе в самых экстремальных режимах, включая походы в холодильник и на жару.. И разобрал... Не спорю - оно работает.. Но дрейф параметров и отсутствие селективности меня не устроило - там всё-таки аналоговый, а не цифровой сигнал.. Катался на оптопарах, там хоть крутизну можно настроить... Где связь-то? Если про "катался"-то родной коммутатор я выкинул лет 7 назад. Потом катался на коммутаторе с 1-ой страницы ветки (промышленный).
Re: ФУОЗ на базе AC-CDI
Вс май 16, 2021 18:41:20
madi044.Но вы же катались с родным коммутатором и вас зто устраивало.Но когда понял,что можно улучшить и вы это сделали и я уверен в обратку вы не пойдёте как и я.