STM32F103C8+HAL_SPI+Si4432
Вт сен 19, 2017 09:05:27
Здравствуйте. 
Я немного вот хочу разобраться в вопросе использования модуля на Si4432 посредством библиотек HAL_SPI, т.к. опыта еще в этом не имею...
Суть проблемы такова:
Исходя из данных, полученных по этой статье http://wiredlogic.io/ru/diy-radio-si443 ... source-ru/ решил получить в ответ от модуля (по JTAG STlink V2) 06h, сконфигурировав проект в CubeMX потом отредактирвав через Keil, собственно и подключив всё подобающим способом, но в ответ по RadioData только 0xFF. Осциллоскопом рассмотреть побайтно пока возможности нет, но короткие пачки по всем трём линиям увидеть можно.
Далее нашёл статью на mcu.bu и решил собрать по аналогии, но результат тот-же, иногда в ответ приходит 0х01.
Буду рад любой информации, особенно по этой теме.
Вот main.c (по последнему варианту):
Для информации - пин ON - PC13 (LED) - чисто мигает;
пин NSEL - PA4 (СS) реализован программно.
Я немного вот хочу разобраться в вопросе использования модуля на Si4432 посредством библиотек HAL_SPI, т.к. опыта еще в этом не имею...
Суть проблемы такова:
Исходя из данных, полученных по этой статье http://wiredlogic.io/ru/diy-radio-si443 ... source-ru/ решил получить в ответ от модуля (по JTAG STlink V2) 06h, сконфигурировав проект в CubeMX потом отредактирвав через Keil, собственно и подключив всё подобающим способом, но в ответ по RadioData только 0xFF. Осциллоскопом рассмотреть побайтно пока возможности нет, но короткие пачки по всем трём линиям увидеть можно.
Далее нашёл статью на mcu.bu и решил собрать по аналогии, но результат тот-же, иногда в ответ приходит 0х01.
Буду рад любой информации, особенно по этой теме.
Вот main.c (по последнему варианту):
Спойлер
- Код:
/* Includes ----------*/
#include "main.h"
#include "stm32f1xx_hal.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private variables ----------*/
SPI_HandleTypeDef hspi2;
/* USER CODE BEGIN PV */
/* Private variables ----------*/
//float translate(uint16_t result){
// return result * 0.07;
//}
//float ms(float data){
// return 0.1F * data;
//}
/* USER CODE END PV */
/* Private function prototypes ----------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_SPI2_Init(void);
/* USER CODE BEGIN PFP */
/* Private function prototypes ----------*/
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t address = 0;
uint8_t data = 0;
//uint8_t data_return[2] = {0};
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_0);
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
HAL_GPIO_WritePin(ON_GPIO_Port, ON_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(NSEL_GPIO_Port, NSEL_Pin, GPIO_PIN_SET);
MX_SPI2_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
HAL_GPIO_WritePin(ON_GPIO_Port, ON_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(NSEL_GPIO_Port, NSEL_Pin, GPIO_PIN_RESET);
address = 0x01; //whoami
HAL_SPI_TransmitReceive(&hspi2, &address, &data, sizeof(data), 0x1000);
HAL_GPIO_WritePin(NSEL_GPIO_Port, NSEL_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(ON_GPIO_Port, ON_Pin, GPIO_PIN_SET);
HAL_Delay (1000);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/** System Clock Configuration
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
/* SPI2 init function */
static void MX_SPI2_Init(void)
{
hspi2.Instance = SPI2;
hspi2.Init.Mode = SPI_MODE_MASTER;
hspi2.Init.Direction = SPI_DIRECTION_2LINES;
hspi2.Init.DataSize = SPI_DATASIZE_8BIT;
hspi2.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi2.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi2.Init.NSS = SPI_NSS_SOFT;
hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256;
hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi2.Init.TIMode = SPI_TIMODE_DISABLE;
hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi2.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
}
/** Configure pins as
* Analog
* Input
* Output
* EVENT_OUT
* EXTI
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(ON_GPIO_Port, ON_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(NSEL_GPIO_Port, NSEL_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin : ON_Pin */
GPIO_InitStruct.Pin = ON_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(ON_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : NSEL_Pin */
GPIO_InitStruct.Pin = NSEL_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(NSEL_GPIO_Port, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @param None
* @retval None
*/
void _Error_Handler(char * file, int line)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
while(1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif
/**
* @}
*/
/**
* @}
*/
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
Для информации - пин ON - PC13 (LED) - чисто мигает;
пин NSEL - PA4 (СS) реализован программно.
Re: STM32F103C8+HAL_SPI+Si4432
Сб сен 23, 2017 11:35:40
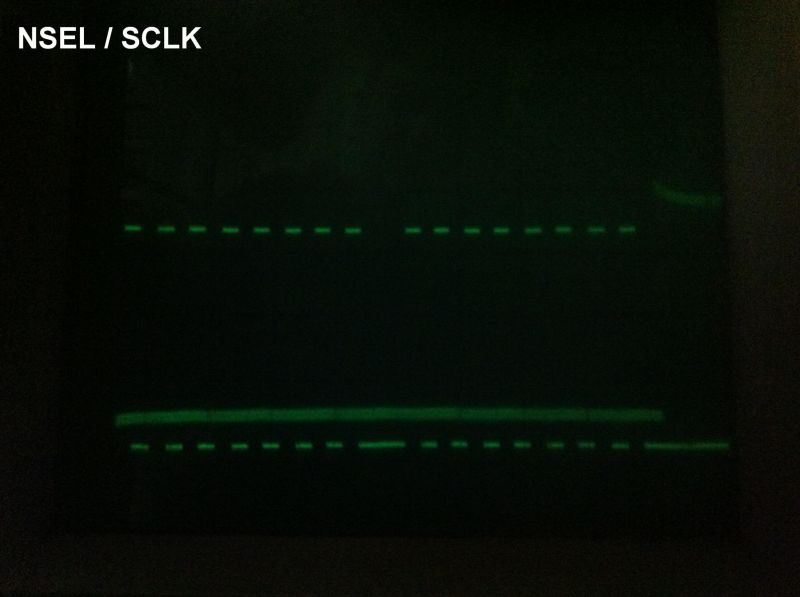
Немножко поразбиравшись в вопросе, осциллоскопом обнаружил, что данные по MOSI в соответствии с SCLK посылаются правильно, а линия CS или NSEL отрабатывает гораздо быстрее, чем цикл передачи данных по SPI
Почитав даташит, процесс инициализации модуля сделал "по святцам", но упёрся в одну особенность после отправки данных нужно обязательно подтвердить её завершение, а уж потом переводить ногу NSEL в высокое состояние. В связи с этим и посыпались вопросы о реализации.
Наткнулся на статью, где описано использование DMA, но т.к. статья имеет довольно мало подробностей, то сделать что-то работающее из этого у меня не вышло, как я делал:
В main.c:
В файле stm32f1xx_it.c соответственно по примеру
Естественно TXcomplete не становится равной 1. Потому что, я всё делаю не так, а как надо - не знаю.
Пробовал другой вариант, нашёл в электронной литературе по HAL для STM32F1xx функцию HAL_SPI_TX_Cplt() (написал по памяти), которую вроде бы как нужно вызвать для подтверждения передачи, но вызывая её попадаю на код UNUSED в теле void HAL_SPI_TX_Cplt () в файле драйвера hal spi.
Почитав даташит, процесс инициализации модуля сделал "по святцам", но упёрся в одну особенность после отправки данных нужно обязательно подтвердить её завершение, а уж потом переводить ногу NSEL в высокое состояние. В связи с этим и посыпались вопросы о реализации.
Наткнулся на статью, где описано использование DMA, но т.к. статья имеет довольно мало подробностей, то сделать что-то работающее из этого у меня не вышло, как я делал:
В main.c:
- Код:
дополнительно добавил гл.перем.:
int TXcomplete = 0;
int RXcomplete = 0;
--далее пропускаем всякую лабуду---
TXcomplete =0;
HAL_SPI_Transmit_DMA(&hspi1; &addreess; 1)
while (TXcomplete ==1);
ну и т.д.
В файле stm32f1xx_it.c соответственно по примеру
- Код:
extern int TXcomplete;
extern int RXcomplete;
----------
void DMA2_Stream3_IRQHandler(void)
{
/* USER CODE BEGIN DMA2_Stream3_IRQn 0 */
TXcomplete = 1;
/* USER CODE END DMA2_Stream3_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_spi1_tx);
Естественно TXcomplete не становится равной 1. Потому что, я всё делаю не так, а как надо - не знаю.
Пробовал другой вариант, нашёл в электронной литературе по HAL для STM32F1xx функцию HAL_SPI_TX_Cplt() (написал по памяти), которую вроде бы как нужно вызвать для подтверждения передачи, но вызывая её попадаю на код UNUSED в теле void HAL_SPI_TX_Cplt () в файле драйвера hal spi.
Re: STM32F103C8+HAL_SPI+Si4432
Вт сен 26, 2017 10:34:34
Продолжаем монолог, вот, собственно поступил вот так:
Код main.c:
Но после
зацикливается на первом же
И, что примечтаельно, если использовать
то фокус проходит, прерывание по завершению передачи проходит, но, естетсвенно, нет чтения
Если после transmit сделать так:
, то фокус уже не проходит.
Радиомодуль уже запаял другой, ошибок в линиях связи нет, как собственно и чтения регистров.
И да, если по линии MOSI и SCLK можно наблюдать нормальные соответствующие адресу прямоугольники, то на MISO творится какая-то непонятная хренотень не очень напоминающая сигнал SPI.
Код main.c:
Спойлер
- Код:
/**
******************************************************************************
* File Name : main.c
* Description : Main program body
******************************************************************************
** This notice applies to any and all portions of this file
* that are not between comment pairs USER CODE BEGIN and
* USER CODE END. Other portions of this file, whether
* inserted by the user or by software development tools
* are owned by their respective copyright owners.
*
* COPYRIGHT(c) 2017 STMicroelectronics
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
* 3. Neither the name of STMicroelectronics nor the names of its contributors
* may be used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
* OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
******************************************************************************
*/
/* Includes ----------*/
#include "main.h"
#include "stm32f1xx_hal.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private variables ----------*/
SPI_HandleTypeDef hspi1;
DMA_HandleTypeDef hdma_spi1_tx;
DMA_HandleTypeDef hdma_spi1_rx;
/* USER CODE BEGIN PV */
uint8_t address = 0;
uint8_t address1 = 0;
uint8_t data = 0;
uint8_t Int1 = 0;
uint8_t Int2 = 0;
uint8_t TXcomplete = 0;
uint8_t TXRXcomplete = 0;
/* Private variables ----------*/
/* USER CODE END PV */
/* Private function prototypes ----------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_SPI1_Init(void);
/* USER CODE BEGIN PFP */
/* Private function prototypes ----------*/
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
void HAL_SPI_TxCpltCallback(SPI_HandleTypeDef *hspi)
{
if (hspi->Instance == hspi1.Instance) {
TXcomplete = 1;
}
}
void HAL_SPI_TxRxCpltCallback(SPI_HandleTypeDef *hspi)
{
if (hspi->Instance == hspi1.Instance) {
TXRXcomplete = 1;
}
}
void Write (uint8_t address, uint8_t data)
{
address1 = (address|0x80);
HAL_GPIO_WritePin(NSEL_GPIO_Port, NSEL_Pin, GPIO_PIN_RESET);
TXcomplete = 0;
HAL_SPI_Transmit_IT(&hspi1, &address1, 1);
while (TXcomplete == 0);
TXcomplete = 0;
HAL_SPI_Transmit_IT(&hspi1, &data, 1);
while (TXcomplete == 0);
TXcomplete = 0;
HAL_GPIO_WritePin(NSEL_GPIO_Port, NSEL_Pin, GPIO_PIN_SET);
HAL_Delay (10);
}
uint8_t Read (uint8_t address)
{
HAL_GPIO_WritePin(NSEL_GPIO_Port, NSEL_Pin, GPIO_PIN_RESET);
TXRXcomplete = 0;
HAL_SPI_TransmitReceive_IT(&hspi1, &address, &data, 1);
while (TXRXcomplete == 0);
TXRXcomplete = 0;
HAL_GPIO_WritePin(NSEL_GPIO_Port, NSEL_Pin, GPIO_PIN_SET);
HAL_Delay (10);
return data;
}
void SI4432_Init()
{
HAL_GPIO_WritePin(SDN_GPIO_Port, SDN_Pin, GPIO_PIN_RESET);
HAL_Delay (200);
Read (0x00);
Read (0x01);
Read (0x02);
Int1 = Read (0x03);
Int2 = Read (0x04);
Write (0x07, 0x80);
while (HAL_GPIO_ReadPin(NIRQ_GPIO_Port, NIRQ_Pin) == 1);
Int1 = Read (0x03);
Int2 = Read (0x04);
HAL_Delay (1);
}
/* USER CODE END 0 */
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_SPI1_Init();
/* USER CODE BEGIN 2 */
//SI4432_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
SI4432_Init();
}
/* USER CODE END 3 */
}
/** System Clock Configuration
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
/* SPI1 init function */
static void MX_SPI1_Init(void)
{
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi1.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi1) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
}
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* DMA interrupt init */
/* DMA1_Channel2_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel2_IRQn);
/* DMA1_Channel3_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel3_IRQn);
}
/** Configure pins as
* Analog
* Input
* Output
* EVENT_OUT
* EXTI
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(SDN_GPIO_Port, SDN_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(NSEL_GPIO_Port, NSEL_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin : SDN_Pin */
GPIO_InitStruct.Pin = SDN_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(SDN_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : NIRQ_Pin */
GPIO_InitStruct.Pin = NIRQ_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(NIRQ_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : NSEL_Pin */
GPIO_InitStruct.Pin = NSEL_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(NSEL_GPIO_Port, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @param None
* @retval None
*/
void _Error_Handler(char * file, int line)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
while(1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif
/**
* @}
*/
/**
* @}
*/
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
Но после
- Код:
HAL_SPI_TransmitReceive_IT(&hspi1, &address, &data, 1);
зацикливается на первом же
- Код:
while (TXRXcomplete == 0);
И, что примечтаельно, если использовать
- Код:
HAL_SPI_Transmit_IT(&hspi1, &address, 1);
while (TXcomplete == 0);
то фокус проходит, прерывание по завершению передачи проходит, но, естетсвенно, нет чтения
Если после transmit сделать так:
- Код:
HAL_SPI_Receive_IT(&hspi1, &address, 1);
while (RXcomplete == 0);
, то фокус уже не проходит.
Радиомодуль уже запаял другой, ошибок в линиях связи нет, как собственно и чтения регистров.
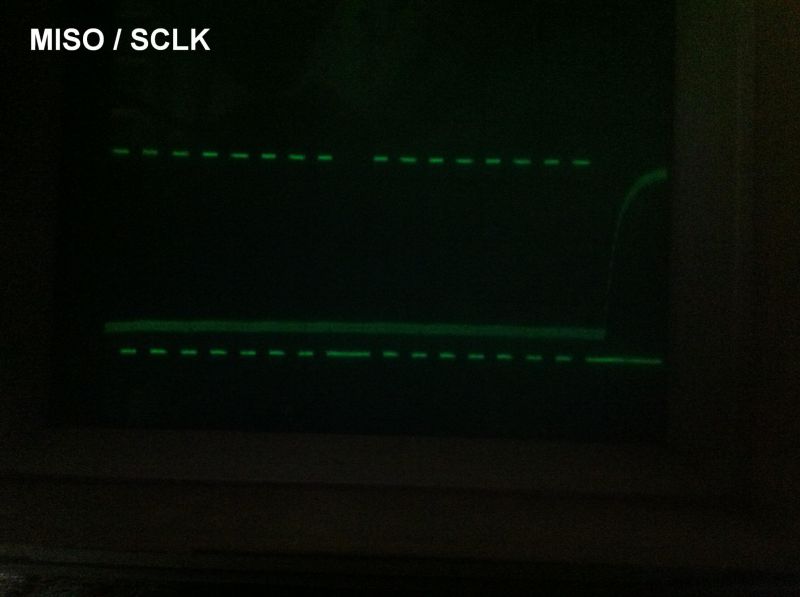
И да, если по линии MOSI и SCLK можно наблюдать нормальные соответствующие адресу прямоугольники, то на MISO творится какая-то непонятная хренотень не очень напоминающая сигнал SPI.
Re: STM32F103C8+HAL_SPI+Si4432
Ср сен 27, 2017 14:20:51
Вы не пробовали читать документацию, вместо слепого тыканья в калокубе?
viewtopic.php?f=59&t=67578&p=3119148&hilit=%D0%96%D0%B4%D0%B5%D0%BC+%D1%84%D0%BB%D0%B0%D0%B3+RXNE#p3119148
viewtopic.php?f=59&t=67578&p=3119148&hilit=%D0%96%D0%B4%D0%B5%D0%BC+%D1%84%D0%BB%D0%B0%D0%B3+RXNE#p3119148
Re: STM32F103C8+HAL_SPI+Si4432
Чт сен 28, 2017 12:45:40
Возможно порой были тыканья и бездумными, но старался привести всё в рабочее состояние, порой экспериментировал, но зачастую делал так, как оно должно быть (я так думаю).
Есть один нюанс - замечательная функция в HAL, а именно HAL_SPI_TransmitReceive, блокирующая функция, в принципе этого и достаточно для чисто проверки работоспособности модуля, её в основном в пример и ставят, как это делалось по ссылке из первого поста, достаточно поставить перед функцией NSEL в ноль, а после в 1. И NSEL действительно отрабатывает как положено.
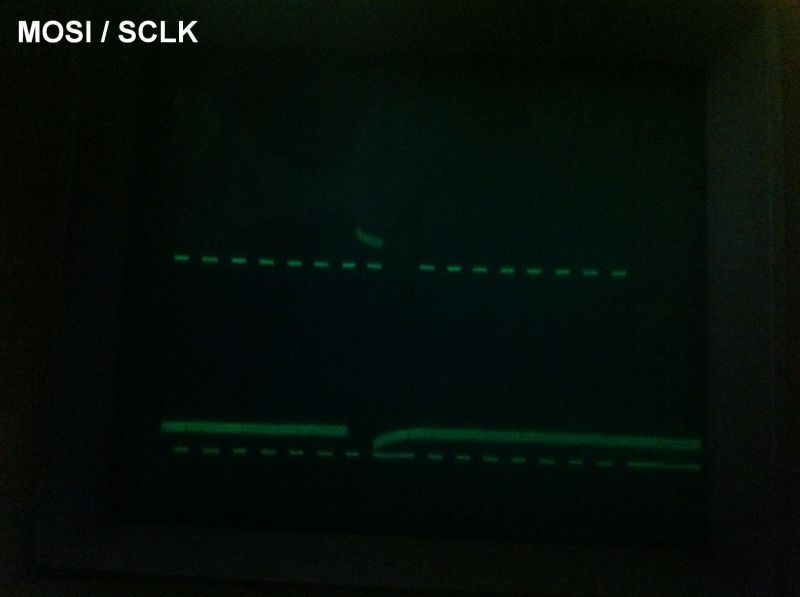
Как выглядит дело визуально (логического анализатора пока нет, пока...) один из каналов осциллографа немного не настроен, но сути не меняет.
Сигнал MOSI относительно синхронизации по SCK:

Сигнал MISO относительно синхронизации по SCK (как видно - даже не колышется):

Сигнал NSEL:

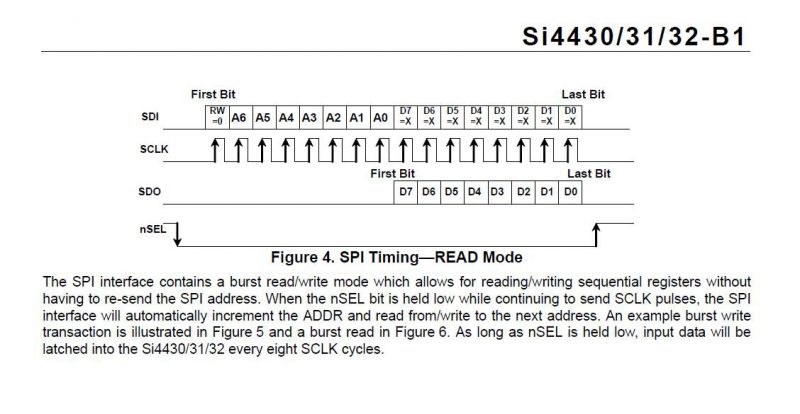
А вот, собственно, инфо из даташита:

Возможно сказывается временной промежуток между пачками тактирующего сигнала, в таком случае можно передавать сразу 16 бит данных, но как в эти 16 бит увязать для передачи двух переменных адреса и данных еще не знаю...
Модуль уже третий из 4-х, да и плату с STM32 уже другую взял.
Подключение:
На плате МК ------- На модуле
PA7 (MOSI) -------- SDI
PA6 (MISO) -------- SDO
PA5 (SCK) -------- SCLK
PA4 (SS) -------- NSEL
PB0 (ON_Pin)-------- SDN
3V3 -------- VDD
ну и GND само собой.
Есть один нюанс - замечательная функция в HAL, а именно HAL_SPI_TransmitReceive, блокирующая функция, в принципе этого и достаточно для чисто проверки работоспособности модуля, её в основном в пример и ставят, как это делалось по ссылке из первого поста, достаточно поставить перед функцией NSEL в ноль, а после в 1. И NSEL действительно отрабатывает как положено.
- Код:
всё это в while
HAL_GPIO_WritePin(ON_GPIO_Port, ON_Pin, GPIO_PIN_RESET); // SDN опускаем в ноль;
HAL_Delay (15); //ждём 15мс - по документации;
HAL_GPIO_WritePin(NSEL_GPIO_Port, NSEL_Pin, GPIO_PIN_RESET); // NSEL в ноль;
address = 0x01;
HAL_SPI_TransmitReceive (&hspi1, &address, &data2, 1, 1000); //передаём адрес;
address = 0x00;
HAL_SPI_TransmitReceive (&hspi1, &address, &data2, 1, 1000); //передаём данные (нули) и здесь должны получить в ответ в data2;
HAL_GPIO_WritePin(NSEL_GPIO_Port, NSEL_Pin, GPIO_PIN_SET); //поднимаем NSEL;
HAL_Delay (1);
HAL_GPIO_WritePin(ON_GPIO_Port, ON_Pin, GPIO_PIN_SET); //переводим в SHUTDOWN;
HAL_Delay (1);
Как выглядит дело визуально (логического анализатора пока нет, пока...) один из каналов осциллографа немного не настроен, но сути не меняет.
Сигнал MOSI относительно синхронизации по SCK:
Сигнал MISO относительно синхронизации по SCK (как видно - даже не колышется):
Сигнал NSEL:
А вот, собственно, инфо из даташита:
Возможно сказывается временной промежуток между пачками тактирующего сигнала, в таком случае можно передавать сразу 16 бит данных, но как в эти 16 бит увязать для передачи двух переменных адреса и данных еще не знаю...
Модуль уже третий из 4-х, да и плату с STM32 уже другую взял.
Подключение:
На плате МК ------- На модуле
PA7 (MOSI) -------- SDI
PA6 (MISO) -------- SDO
PA5 (SCK) -------- SCLK
PA4 (SS) -------- NSEL
PB0 (ON_Pin)-------- SDN
3V3 -------- VDD
ну и GND само собой.
Re: STM32F103C8+HAL_SPI+Si4432
Чт сен 28, 2017 12:57:53
Прочтите внимательно. https://electronix.ru/forum/index.php?showtopic=135896
И обратите внимание -насколько проще делается без кала...
И обратите внимание -насколько проще делается без кала...
Re: STM32F103C8+HAL_SPI+Si4432
Чт сен 28, 2017 14:20:24
Вроде бы и внимательно читал, всё соответствует рабочей конфигурации, как Ваш пример, так и мои примеры... Хоть и медленно, но ехать то как-то должно... Мисо молчит и никаких признаков жизни, единственное - если SDN физически отключить, на MISO появляются какие-то помехи, не очень похожие на полноценные единицы в момент работы SCK. И как-то вот хоронить весь КА HAL из-за такой ситуации не очень нравится, хочется уж точно разобраться в проблеме... Да и в чём, собственно вина HALа -то?, осциллограммы показывают, что посылается равным счетом то, что и хотелось. Если уж здесь есть какие проблемы со стороны драйвера хала, то без проблем, возьмём другой вектор направления.. А пока что внутренний голос намекает на мои косяки или на нерабочие модули...
И да, как у опытного специалиста хочу спросить: вот эти промежутки между пакетами SCK могут как-то влиять на происходящее?
И да, как у опытного специалиста хочу спросить: вот эти промежутки между пакетами SCK могут как-то влиять на происходящее?
Re: STM32F103C8+HAL_SPI+Si4432
Чт сен 28, 2017 14:36:49
Мисо ЭТО ВХОД
Re: STM32F103C8+HAL_SPI+Si4432
Чт сен 28, 2017 16:00:03
dosikus писал(а):Мисо ЭТО ВХОД
Ну да, вход, подключенный к выходу слейва SDO.
На этом этапе, наверное стоит посмотреть в сторону других проверенных spi устройств, ничего правда под руку не попадается, кроме spi flash...
Re: STM32F103C8+HAL_SPI+Si4432
Чт сен 28, 2017 20:45:26
Если вы все же перейдете на нормальный кодинг, я смогу вам предоставить и помощь и ответы на интересующие вас вопросы.
Поймите ни с калокубом ни с SPL у вас ничего не выйдет это раз. И помогать вам никто не сможет.
Все приверженцы г.либ слепы как кроты.
А у меня нет никакого желания толкать вас на путь аурдуньи...
Поймите ни с калокубом ни с SPL у вас ничего не выйдет это раз. И помогать вам никто не сможет.
Все приверженцы г.либ слепы как кроты.
А у меня нет никакого желания толкать вас на путь аурдуньи...
Re: STM32F103C8+HAL_SPI+Si4432
Пт сен 29, 2017 09:04:35
