Не получается запустить генератор AD9834 с ЦАП AD5620
Вс мар 03, 2013 13:16:56
Доброго времени суток.
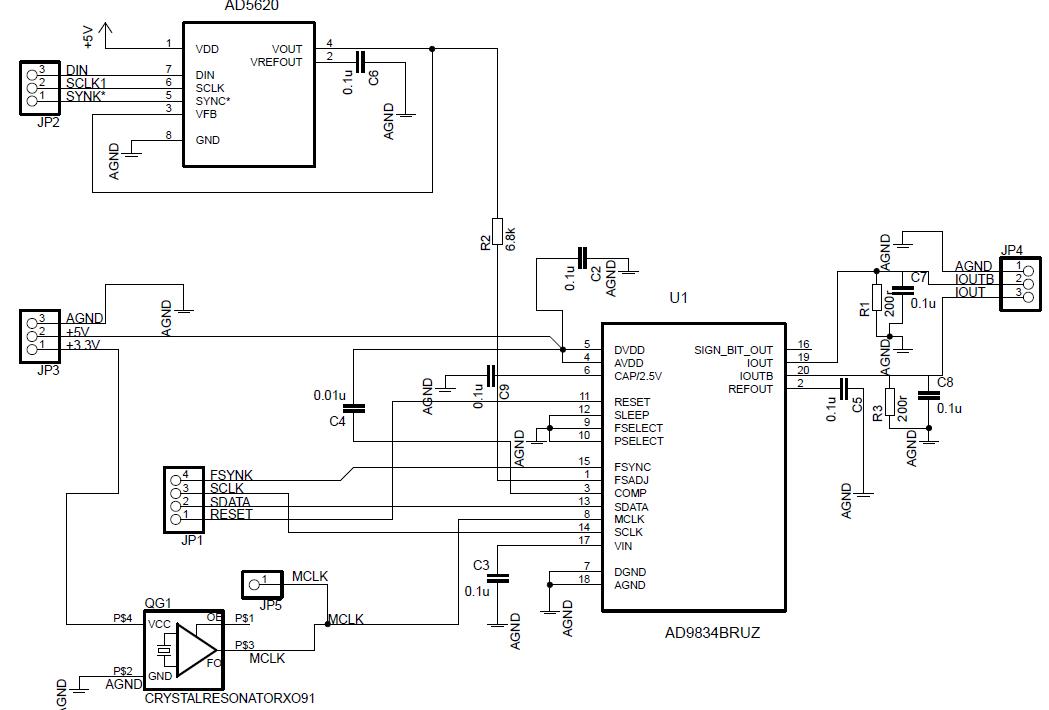
Не получается запустить генератор AD9834 с ЦАП AD5620.
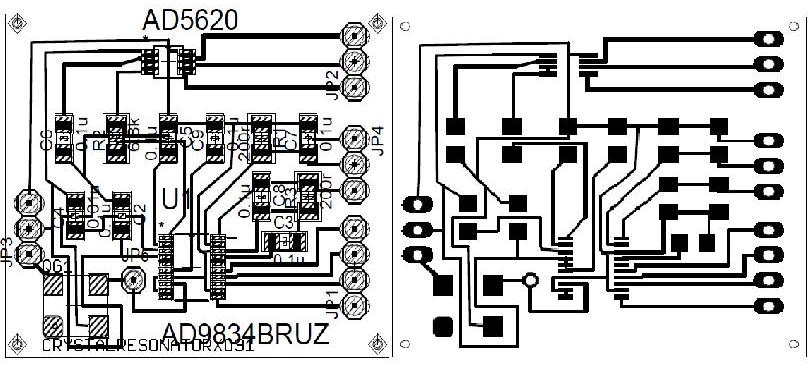
Схемку и печатную плату прикрепил, делал по даташитам, проверьте пожалуйста!
Сигналы с ножек MOSI, SCK и CS МК проверял на осциллографе, все ок. А вот чипы не воспринимают, программа в МК "виснет" на ожидании окончания передачи по SPI. В даташитах на AD9834 и AD5620 указано, что данные принимаются на спадающем фронте SCK, поэтому инициализировал SPI как
SPCR = (1<<SPE)|(1<<MSTR)|(1<<CPHA)|(1<<SPR0);
или
SPCR = (1<<SPE)|(1<<MSTR)|(1<<CPOL)|(1<<SPR0);
,т.е. пробовал по спад. фронту и с отрицательными сигналами SPI, не работает.
Проверял напряжение на ножках REF - как и должно быть, 1.2V. Значит ли это, что чип рабочий? Просто боюсь, что мог перегреть при паянии. Как еще можно проверить?
Сделал уже 2 платы, ни одна не работает
Микроконтроллер Atmega32 с кварцем 16 МГц, фьюзы изменял только для кварца.
Схема
Печатная плата
Даташит AD9834 http://www.analog.com/static/imported-files/data_sheets/AD9834.pdf
Даташит AD5620 http://www.analog.com/static/imported-files/data_sheets/AD5620_5640_5660.pdf
CN0156_Ampl_control_AD9834 http://www.analog.com/en/circuits-from-the-lab/CN0156/vc.html
AN-1070_programming_9834 http://www.analog.com/static/imported-files/application_notes/AN-1070.pdf
Вот мой код в AVR Studio 5.
Не получается запустить генератор AD9834 с ЦАП AD5620.
Схемку и печатную плату прикрепил, делал по даташитам, проверьте пожалуйста!
Сигналы с ножек MOSI, SCK и CS МК проверял на осциллографе, все ок. А вот чипы не воспринимают, программа в МК "виснет" на ожидании окончания передачи по SPI. В даташитах на AD9834 и AD5620 указано, что данные принимаются на спадающем фронте SCK, поэтому инициализировал SPI как
SPCR = (1<<SPE)|(1<<MSTR)|(1<<CPHA)|(1<<SPR0);
или
SPCR = (1<<SPE)|(1<<MSTR)|(1<<CPOL)|(1<<SPR0);
,т.е. пробовал по спад. фронту и с отрицательными сигналами SPI, не работает.
Проверял напряжение на ножках REF - как и должно быть, 1.2V. Значит ли это, что чип рабочий? Просто боюсь, что мог перегреть при паянии. Как еще можно проверить?
Сделал уже 2 платы, ни одна не работает
Микроконтроллер Atmega32 с кварцем 16 МГц, фьюзы изменял только для кварца.
Схема
Печатная плата
Даташит AD9834 http://www.analog.com/static/imported-files/data_sheets/AD9834.pdf
Даташит AD5620 http://www.analog.com/static/imported-files/data_sheets/AD5620_5640_5660.pdf
CN0156_Ampl_control_AD9834 http://www.analog.com/en/circuits-from-the-lab/CN0156/vc.html
AN-1070_programming_9834 http://www.analog.com/static/imported-files/application_notes/AN-1070.pdf
Вот мой код в AVR Studio 5.
- Код:
#include <avr/io.h>
#include <stdio.h>
#define F_CPU 16000000UL // 16 MHz
#ifndef ALIBC_OLD
#include <util/delay.h>
#else
#include <avr/delay.h>
#endif
#include "lcd16.h"
#define AD9834_CONTROL_PORT PORTB
#define AD9834_CONTROL_DDR DDRB
#define AD9834_CONTROL_MISO PORTB6
#define AD9834_CONTROL_MOSI PORTB5
#define AD9834_CONTROL_SCK PORTB7
#define AD9834_CONTROL_CS_PORT PORTB
#define AD9834_CONTROL_CS_DDR DDRB
#define AD9834_CONTROL_CS PORTB0
#define AD9834_CONTROL_RESET_PORT PORTB
#define AD9834_CONTROL_RESET_DDR DDRB
#define AD9834_CONTROL_RESET PORTB1
// set CS to 0 = active
#define CSACTIVEAD9834 AD9834_CONTROL_CS_PORT &= ~(1<<AD9834_CONTROL_CS)
// set CS to 1 = passive
#define CSPASSIVEAD9834 AD9834_CONTROL_CS_PORT |= (1<<AD9834_CONTROL_CS)
///////////////////////////////////////////////////
#define AD5620_CONTROL_PORT PORTB
#define AD5620_CONTROL_DDR DDRB
#define AD5620_CONTROL_MISO PORTB6
#define AD5620_CONTROL_MOSI PORTB5
#define AD5620_CONTROL_SCK PORTB7
#define AD5620_CONTROL_CS_PORT PORTB
#define AD5620_CONTROL_CS_DDR DDRB
#define AD5620_CONTROL_CS PORTB2
// set CS to 0 = active
#define CSACTIVEAD5620 AD5620_CONTROL_CS_PORT &= ~(1<<AD5620_CONTROL_CS)
// set CS to 1 = passive
#define CSPASSIVEAD5620 AD5620_CONTROL_CS_PORT |= (1<<AD5620_CONTROL_CS)
#define waitspi() while(!(SPSR & (1<<SPIF)))
void SPI_write16_AD9834 (unsigned short data) // send a 16bit word and use fsync
{
unsigned char MSdata = ((data>>8) & 0x00FF); //filter out MS
unsigned char LSdata = (data & 0x00FF); //filter out LS
CSACTIVEAD9834; // Fsync Low --> begin frame
SPDR = MSdata; // send First 8 MS of data
waitspi(); // while busy
SPDR = LSdata; // send Last 8 LS of data
waitspi(); // while busy
CSPASSIVEAD9834; // Fsync High --> End of frame
}
void SPI_write16_AD5620 (unsigned short data) // send a 16bit word and use fsync
{
unsigned char MSdata = ((data>>8) & 0x00FF); //filter out MS
unsigned char LSdata = (data & 0x00FF); //filter out LS
CSACTIVEAD5620; // Fsync Low --> begin frame
//write data
SPDR = MSdata; // send First 8 MS of data
waitspi(); // while busy
SPDR = LSdata; // send Last 8 LS of data
waitspi(); // while busy
CSPASSIVEAD5620; // Fsync High --> End of frame
}
int main(void)
{
//LED
DDRC = 0x02; //set C.1 as out - led
PORTC = 0x02;
CSPASSIVEAD9834;
CSPASSIVEAD5620;
//SPI init
AD5620_CONTROL_DDR |= (1<<AD5620_CONTROL_MOSI)|(1<<AD5620_CONTROL_SCK);
AD5620_CONTROL_CS_DDR |= (1<<AD5620_CONTROL_CS);
AD9834_CONTROL_CS_DDR |= (1<<AD9834_CONTROL_CS);
AD9834_CONTROL_RESET_DDR |= (1<<AD9834_CONTROL_RESET);
// SPI Clock Phase: falling edge
// SPI Data Order: MSB First
// set clock rate fck/16
SPCR |= (1<<SPE)|(1<<MSTR)|(1<<CPHA)|(1<<SPR0);
//AD9834_init
SPI_write16_AD9834(0x2100); // control word, set output to mid value voltage
SPI_write16_AD9834(0x429F); // Freq0 registerdata LSB = approx. 50 hz
SPI_write16_AD9834(0x4000); // Freq0 registerdata MSB = approx. 50 hz
//Freq_write (50,0);
SPI_write16_AD9834(0x82C7); // Freq1 registerdata LSB = approx. 53 hz
SPI_write16_AD9834(0x8000); // Freq1 registerdata MSB = approx. 53 hz
//Freq_write (53,1);
SPI_write16_AD9834(0xC000); // Phase offset of Phase0 = 0
//Phase_write(0,0);
SPI_write16_AD9834(0xE155); // Phase offset of Phase1 = 30_grad
//Phase_write(30,1);
SPI_write16_AD9834(0x2000); // control word, set output = sine
//AD5620_init
SPI_write16_AD5620 (0x0000);
//LCD
DDRD = 0xFF;
int i; i = 0;
char lcd_buffer[33];
lcdInit(); // init the LCD screen
_delay_ms(50);
lcdCmd(0x01); // clear lcd
_delay_ms(50);
gotoXy(5,0); // goto (0.0)
prints("LCD");
CSACTIVEAD9834;
_delay_ms(2000);
CSPASSIVEAD9834;
CSACTIVEAD5620;
_delay_ms(2000);
CSPASSIVEAD5620;
gotoXy(0,1); // goto (0.1)
prints("LCD_ATMEGA32");
_delay_ms(2000);
while(1)
{
i = i+1;
sprintf(lcd_buffer,"counter: %u",i);
lcdCmd(0x01); // clear lcd
gotoXy(0,0); // goto (0.0)
prints(lcd_buffer);
_delay_ms(100);
SPI_write16_AD9834(0x2000);
_delay_ms(100);
PORTC &= ~(1<<PORTC1);
SPI_write16_AD5620 (0x0000);
_delay_ms(1000);
sprintf(lcd_buffer,"counter: %u",i);
lcdCmd(0x01); // clear lcd
gotoXy(0,0); // goto (0.0)
prints(lcd_buffer);
_delay_ms(100);
SPI_write16_AD9834(0x2800);
_delay_ms(100);
PORTC |= (1<<PORTC1);
SPI_write16_AD5620 (0x03E8);
_delay_ms(1000);
}
}