Re: Вопросы по С/С++ (СИ)
Вс апр 03, 2022 10:17:17
Мне лень фигнёй заниматься. У тебя, судя по всему, IAR есть. Поставь оптимизацию на скорость и сам листинги смотри какие хочешь.
Re: Вопросы по С/С++ (СИ)
Вс апр 03, 2022 12:32:20
Только ты с iar-овских листингов сам и начал.
Ты спросил у кого тут iar установлен? Максимум у двух, может быть у трех. В основном cvavr и avr-gcc.
Для чего надо было приводить такое не равное сравнение? 95 и 37, 42 и 26.
Ты спросил у кого тут iar установлен? Максимум у двух, может быть у трех. В основном cvavr и avr-gcc.
Для чего надо было приводить такое не равное сравнение? 95 и 37, 42 и 26.
Re: Вопросы по С/С++ (СИ)
Вс апр 03, 2022 13:00:00
Только ты с iar-овских листингов сам и начал.
Я только недавно писал, что IAR для AVR это самый вменяемый инструмент. По листингу вижу, что он сделал то что я ожидал. Почему я не могу им пользоваться?Ты спросил у кого тут iar установлен? Максимум у двух, может быть у трех. В основном cvavr и avr-gcc.
Мне то до этого какое дело? Пишите в чём хотите.Для чего надо было приводить такое не равное сравнение? 95 и 37, 42 и 26.
Я приводил сравнение??? Чьи "фирменные" тесты c того и спрашивай. А для начала научись компилятором пользоваться! Никогда не поверю, что GCC в 2 раза медленнее код делает. Попытай ARV, накрайняк, у него вроде проблем никогда не было.На 8-битке, кстати, можно ещё побыстрей сделать, если не uint32_t использовать, а требуемые 24 бита. На глаз, такта на 4 меньше.
Спойлер
- Код:
#include "stdint.h"
struct W24
{
uint8_t b1;
uint8_t b2;
uint8_t b3;
};
void foo(volatile W24 *w24, const uint32_t a, bool f)
{
uint16_t tmp = ((a&0xF800)<<1) | (f?(1L<<11):0) | (a&0x700);
w24->b1=(a<<1)>>16; w24->b2=tmp>>8; w24->b3=a;
}
volatile W24 y;
int main()
{
uint32_t a=0;
volatile bool f = true;
while (1)
{
foo(&y,a,f);
a++;
}
}
ЗЫ: Кстати, ты там про битовые поля что-то двигал. Попробуй их на ARM, должно быть забористо.
Re: Вопросы по С/С++ (СИ)
Вс апр 03, 2022 17:47:50
Ну по чему медленнее, то ваше было, а вот 52 и 47, 40 и 36, мое. Не вижу тут в 2 раза, какие-то 11-12 тактов разница, в пользу iar.VladislavS писал(а):что GCC в 2 раза медленнее код делает.
Не думаю что там забористо будет, возможно будет значительно хуже.VladislavS писал(а):Попробуй их на ARM, должно быть забористо.
Re: Вопросы по С/С++ (СИ)
Вс апр 03, 2022 18:43:28
95/42 это больше чем 2 раза.
Re: Вопросы по С/С++ (СИ)
Вс апр 03, 2022 18:59:19
В моем случае я предоставил выбор компилятору, а как он на оптимизировал ... х бы его знал.
Вот на arm stm32f100rb
Вот на arm stm32f100rb
Спойлер
- Код:
iar-arm
мой его
51 такт 33 без inline
34 23 inline
Re: Вопросы по С/С++ (СИ)
Вт апр 12, 2022 15:49:16
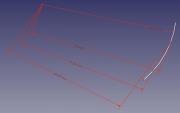
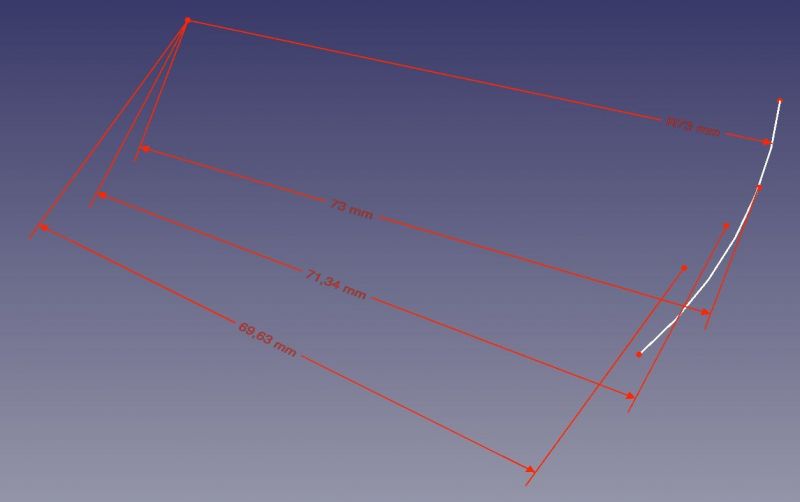
братцы, что я делаю не так?
стоит задача: есть некая фигура, описанная точками на плоскости. надо повернуть эту фигуру относительно другой точки на заданный угол.
поворот точки относительно другой точки описывается такими выражениями:
формулы общеизвестны, однако, вместо поворота получается хрень...
проверяю:
что я делаю не так?! как надо делать, блин?!
стоит задача: есть некая фигура, описанная точками на плоскости. надо повернуть эту фигуру относительно другой точки на заданный угол.
поворот точки относительно другой точки описывается такими выражениями:
, где (xy) - исходная точка, (x1y1) - результат поворота, а (x0y0) - точка, относительно которой делается поворотx1=(x-x0)∗cos(ϕ)−(y-y0)∗sin(ϕ) + x0
y1=(x-x0)∗sin(ϕ)+(y-y0)∗cos(ϕ) + y0
формулы общеизвестны, однако, вместо поворота получается хрень...
проверяю:
- Код:
#include <stdio.h>
#include <stdint.h>
#include <math.h>
#define CENTER 127
void rotate(int *x, int *y, float a){
int tx = *x - CENTER;
int ty = *y - CENTER;
tx = tx * cos(a) - ty * sin(a);
ty = tx * sin(a) + ty * cos(a);
ty += CENTER;
tx += CENTER;
*x=tx; *y = ty;
}
int x, y;
int x0 = 127;
int y0 = 127;
float r;
int main(void) {
// your code goes here
for(uint8_t i = 0; i<60; i++){
x = 127; y = 200;
rotate(&x, &y, i * 3.1415 * 2 / 60);
rotate(&x0, &y0, i * 3.1415 * 2 / 60);
r = sqrt((x0-x)*(x0-x)+(y0-y)*(y0-y));
printf("i=%d, x0=%d, y0=%d, x=%d, y=%d, r=%f\n", i,x0, y0, x, y, r);
}
return 0;
}
вот тут все можно еще раз проверить: https://ideone.com/vdqbQxi=0, x0=127, y0=127, x=127, y=200, r=73.000000
i=1, x0=127, y0=127, x=120, y=198, r=71.344238
i=2, x0=127, y0=127, x=112, y=195, r=69.634758
i=3, x0=127, y0=127, x=105, y=189, r=65.787537
i=4, x0=127, y0=127, x=98, y=181, r=61.294373
i=5, x0=127, y0=127, x=91, y=172, r=57.628117
i=6, x0=127, y0=127, x=85, y=161, r=54.037025
i=7, x0=127, y0=127, x=79, y=149, r=52.801514
i=8, x0=127, y0=127, x=73, y=135, r=54.589375
i=9, x0=127, y0=127, x=68, y=123, r=59.135437
i=10, x0=127, y0=127, x=64, y=109, r=65.520988
i=11, x0=127, y0=127, x=61, y=97, r=72.498276
i=12, x0=127, y0=127, x=58, y=84, r=81.301903
i=13, x0=127, y0=127, x=56, y=73, r=89.202019
i=14, x0=127, y0=127, x=55, y=64, r=95.671310
i=15, x0=127, y0=127, x=55, y=56, r=101.118744
i=16, x0=127, y0=127, x=55, y=48, r=106.887794
i=17, x0=127, y0=127, x=56, y=43, r=109.986366
i=18, x0=127, y0=127, x=58, y=39, r=111.825760
i=19, x0=127, y0=127, x=61, y=38, r=110.801628
i=20, x0=127, y0=127, x=64, y=36, r=110.679718
i=21, x0=127, y0=127, x=68, y=37, r=107.615051
i=22, x0=127, y0=127, x=73, y=39, r=103.247276
i=23, x0=127, y0=127, x=79, y=41, r=98.488579
i=24, x0=127, y0=127, x=85, y=44, r=93.021500
i=25, x0=127, y0=127, x=91, y=46, r=88.639717
i=26, x0=127, y0=127, x=98, y=49, r=83.216583
i=27, x0=127, y0=127, x=105, y=51, r=79.120163
i=28, x0=127, y0=127, x=112, y=53, r=75.504967
i=29, x0=127, y0=127, x=120, y=54, r=73.334846
i=30, x0=127, y0=127, x=127, y=55, r=72.000000
i=31, x0=127, y0=127, x=134, y=54, r=73.334846
i=32, x0=127, y0=127, x=142, y=53, r=75.504967
i=33, x0=127, y0=127, x=149, y=51, r=79.120163
i=34, x0=127, y0=127, x=156, y=49, r=83.216583
i=35, x0=127, y0=127, x=163, y=46, r=88.639717
i=36, x0=127, y0=127, x=169, y=44, r=93.021500
i=37, x0=127, y0=127, x=175, y=41, r=98.488579
i=38, x0=127, y0=127, x=181, y=39, r=103.247276
i=39, x0=127, y0=127, x=186, y=37, r=107.615051
i=40, x0=127, y0=127, x=190, y=36, r=110.679718
i=41, x0=127, y0=127, x=193, y=38, r=110.801628
i=42, x0=127, y0=127, x=196, y=39, r=111.825760
i=43, x0=127, y0=127, x=198, y=43, r=109.986366
i=44, x0=127, y0=127, x=199, y=48, r=106.887794
i=45, x0=127, y0=127, x=199, y=55, r=101.823380
i=46, x0=127, y0=127, x=199, y=64, r=95.671310
i=47, x0=127, y0=127, x=198, y=73, r=89.202019
i=48, x0=127, y0=127, x=196, y=84, r=81.301903
i=49, x0=127, y0=127, x=193, y=97, r=72.498276
i=50, x0=127, y0=127, x=190, y=109, r=65.520988
i=51, x0=127, y0=127, x=186, y=123, r=59.135437
i=52, x0=127, y0=127, x=181, y=135, r=54.589375
i=53, x0=127, y0=127, x=175, y=149, r=52.801514
i=54, x0=127, y0=127, x=169, y=161, r=54.037025
i=55, x0=127, y0=127, x=163, y=172, r=57.628117
i=56, x0=127, y0=127, x=156, y=181, r=61.294373
i=57, x0=127, y0=127, x=149, y=189, r=65.787537
что я делаю не так?! как надо делать, блин?!
Re: Вопросы по С/С++ (СИ)
Вт апр 12, 2022 19:16:09
Так исходные точки (x,y) не принадлежат одной окружности с радиусом в точке поворота ...
... потому и r разные
... потому и r разные
Re: Вопросы по С/С++ (СИ)
Вт апр 12, 2022 20:16:52
какие исходные?! исходная одна, вторая - центр вращения! и как раз тот факт, что при вращении точки не лежат на окружности, меня и шокирует!
Re: Вопросы по С/С++ (СИ)
Вт апр 12, 2022 20:47:13
... где (xy) - исходная точка, (x1y1) - результат поворота, а (x0y0) - точка, относительно которой делается поворот
...
...
i=0, x0=127, y0=127, x=127, y=200, r=73.000000
i=1, x0=127, y0=127, x=120, y=198, r=71.344238
i=2, x0=127, y0=127, x=112, y=195, r=69.634758
...
Может что-то в консерватории подправить? (С) М.Жванецкий
Re: Вопросы по С/С++ (СИ)
Вт апр 12, 2022 20:59:28
ну, в консерватории можно подправить... хотя по коду видно же, что сначала x и y присваиваются, а потом передаются в функцию поворота, и уже оттуда возвращаются с новыми (повернутыми) значениями, которые и выводтся
Re: Вопросы по С/С++ (СИ)
Вт апр 12, 2022 21:04:10
tx = tx * cos(a) - ty * sin(a);
ty = tx * sin(a) + ty * cos(a);
У вас меняется tx. Так эти формулы не работают. Надо новые координаты запомнить в отдельных переменных.
Re: Вопросы по С/С++ (СИ)
Вт апр 12, 2022 21:10:10
Мне, почему-то не совсем нравится:
rotate(&x, &y, i * 3.1415 * 2 / 60); где i - целое, а в функцию должен уйти float результат
Может, для уверенности rotate(&x, &y, float(i * 3.1415 * 2 / 60)); ?
Я однажды запал на такое:
(stepAngle -- float, stepFrame -- int)
причём:
stepAngle = 360/stepFrame;
и stepAngle = float(360/stepFrame);
давало мне совсем не то, что я в столбик посчитал
и только stepAngle = float(360.0/stepFrame) привело к тому, что было нужно.
rotate(&x, &y, i * 3.1415 * 2 / 60); где i - целое, а в функцию должен уйти float результат
Может, для уверенности rotate(&x, &y, float(i * 3.1415 * 2 / 60)); ?
Я однажды запал на такое:
(stepAngle -- float, stepFrame -- int)
причём:
stepAngle = 360/stepFrame;
и stepAngle = float(360/stepFrame);
давало мне совсем не то, что я в столбик посчитал
и только stepAngle = float(360.0/stepFrame) привело к тому, что было нужно.
Re: Вопросы по С/С++ (СИ)
Вт апр 12, 2022 21:19:03
да чтоб меня!!! вот, блин, ступил, так ступил!!!da-nie писал(а):У вас меняется tx
спасибо тебе, добрый человек!!!

Добавлено after 4 minutes 40 seconds:
было:
стало:
вот что крест животворящийвзгляд незамыленный делает!
еще раз спасибо, da-nie!
Re: Вопросы по С/С++ (СИ)
Вс июл 03, 2022 08:58:40
прошу подсказать, как вычислить время требуемое на то чтобы пройти заданное расстояние по формуле t=√S/(2*a). Проблема в квадратном корне. Но я вычитал, что на третьем кортексе быстрее всего целочисленное привести к флоату, взять корень и снова перевести в целочисленное. Но так как a у меня задаётся как изменение 0.01rpm за 2.5 мс (1r = 220mm)? формула получается такая: √(3000000 * S)/(11 * a). Так вот если я подкоренное выражение считаю целочисленным, то при S=800 (0.8 метра) я уже оказываюсь в переполнении. Как было бы лучше считать. Может эти 3 миллиона уже сделать флоатом и пусть всё считается в плавающей точке?
Пока сделал так. Хотя теряю немного точность - это не принципиально. Функция используется для расчета оптимального маршрута. Главное, чтобы результат был бы всегда повторяем. Но зато вызывается очень много раз.
data.acceleration сейчас порядка 100-200 и distance должна быть до 10 метров (но лучше пусть будет запас еще на порядок).
Пока сделал так. Хотя теряю немного точность - это не принципиально. Функция используется для расчета оптимального маршрута. Главное, чтобы результат был бы всегда повторяем. Но зато вызывается очень много раз.
- Код:
int TimeToRunStraight(int distance) { // in milliseconds from millimeters.
return sqrt(3000000/11 * distance/data.acceleration);
}
data.acceleration сейчас порядка 100-200 и distance должна быть до 10 метров (но лучше пусть будет запас еще на порядок).
Re: Вопросы по С/С++ (СИ)
Вс июл 03, 2022 10:24:13
А если sqrt(3000000*x) воспринимать как 1000*sqrt(3*x)? 3000000 - это же константа, как я понял?
P.S. Хотя, точность будет теряться при целочисленных делениях и умножениях.
P.S. Хотя, точность будет теряться при целочисленных делениях и умножениях.
Re: Вопросы по С/С++ (СИ)
Вс июл 03, 2022 11:25:37
Увы, тогда точность упадёт грохнется. Так как результат будет всегда равен целым секундам. А у меня они как раз скачут в районе секунды - поворот 660мс, прямой участок 531мм - 1474мс итп. И главное, нельзя получить результатом 0 - алгоритм может зациклиться. Собственно, я так на это переполнение набрёл - получил в результате переполнения при умножении отрицательное число (задрал один параметр до максимального значения), квадратный корень из него дал 0 и алгоритм зациклился.
Re: Вопросы по С/С++ (СИ)
Вс июл 03, 2022 13:24:40
Ещё можно на в целочисленных вычислениях на int64_t перейти. Это несильно замедлит вычисления (по сравнению с floag).
Re: Вопросы по С/С++ (СИ)
Вт авг 02, 2022 19:58:34
Ребята, приветствую, есть задача, которую я в принципе решил, но нужна консультация, может кто ее решил бы иначе или проще. Короче: имеем TM1628, задача - считать с него состояния кнопок в матрице с первой по двадцатую. Микросхема для этих целей имеет регистр размером в 5 байт, считывание производится последовательно. Все 5 байт мне не нужны, третий байт я не использую. Читаю с помощью команды shiftln, пишу в 4-хбайтную переменную.
Мой метод: переменной присваиваю значение 128, чтобы впоследствии иметь под рукой все 32 бита
Считываю в переменную первый байт (считываю по методу LSBFIRST, т. К в каждом регистре ТМ два последних бита всегда нулевые)
Сдвигаю биты в переменной на 8 бит влево
Читаю и записываю следующий бит тем же макаром.
Сдвигаю на 8
Третий (ненужный) бит просто читаю, никуда не записывая,
Четвертый читаю, пишу и сдвигаю, пятый просто читаю и пишу без сдвига.
В итоге имею набор из 32 бит с постоянным старшим в единице, который очень удобно разбирать при опросе кнопок, однако сама процедура считывания довольно громоздкая. Вопрос: можно ли упростить и оптимизировать? Код выложу позднее.
Добавлено after 26 minutes 16 seconds:
Вот код. Прошу сильно не пинать - пишу в среде ардуино, но не для ардуины, поэтому все же сюда настрочил - вроде как C, мать его.
Мой метод: переменной присваиваю значение 128, чтобы впоследствии иметь под рукой все 32 бита
Считываю в переменную первый байт (считываю по методу LSBFIRST, т. К в каждом регистре ТМ два последних бита всегда нулевые)
Сдвигаю биты в переменной на 8 бит влево
Читаю и записываю следующий бит тем же макаром.
Сдвигаю на 8
Третий (ненужный) бит просто читаю, никуда не записывая,
Четвертый читаю, пишу и сдвигаю, пятый просто читаю и пишу без сдвига.
В итоге имею набор из 32 бит с постоянным старшим в единице, который очень удобно разбирать при опросе кнопок, однако сама процедура считывания довольно громоздкая. Вопрос: можно ли упростить и оптимизировать? Код выложу позднее.
Добавлено after 26 minutes 16 seconds:
Вот код. Прошу сильно не пинать - пишу в среде ардуино, но не для ардуины, поэтому все же сюда настрочил - вроде как C, мать его.
Спойлер
Код- Код:
void readTMData(unsigned long * data) {
digitalWrite(PIN_STB, LOW);
shiftOut(PIN_DIO, PIN_CLK, LSBFIRST, 0x42); //Команда на чтение регистров с ТМ1628
pinMode(PIN_DIO, INPUT_PULLUP);
delayMicroseconds(1);
bitWrite(*data,7,1); // ставим 7-й бит в 1. После всех сдвигов он станет MSB. Маска ненажатых кнопок будет выглядеть как 10000000000000000000000000000000
* data =*data+ shiftIn(PIN_DIO, PIN_CLK, LSBFIRST); // Считали и записали первый байт
* data= * data<<8; // Сдвинули
* data = *data+shiftIn(PIN_DIO, PIN_CLK, LSBFIRST); // Считали и записали второй байт
* data= * data<<8; // Сдвинули
shiftIn(PIN_DIO, PIN_CLK, LSBFIRST); // Вот тут просто считали, никуда не записывая, чтобы не рвать последовательность чтения
* data =*data+ shiftIn(PIN_DIO, PIN_CLK, LSBFIRST); // Считали и записали четвертый байт
* data= * data<<8; // Сдвинули
* data = *data+shiftIn(PIN_DIO, PIN_CLK, LSBFIRST); // Считали и записали пятый байт
pinMode(PIN_DIO, OUTPUT);
digitalWrite(PIN_STB, HIGH);
}
Re: Вопросы по С/С++ (СИ)
Вт авг 02, 2022 20:46:21
Идея:
В:
строка 25..38, посмотрите как написано shiftIn() для 8 бит. Напишите напр. локальную функцию (под другим именем) или просто перепишите логику для 4 * 8 бита (long) или больше (5 байт) (при этом, конечно, соблюдая разрядность новых типов данных - некоторые типы перейдут на uint64_t. А можете оптимизировать: до uint32_t, как написали напр. есть ненужный байт).
В:
- Код:
C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino\wiring_shift.c
строка 25..38, посмотрите как написано shiftIn() для 8 бит. Напишите напр. локальную функцию (под другим именем) или просто перепишите логику для 4 * 8 бита (long) или больше (5 байт) (при этом, конечно, соблюдая разрядность новых типов данных - некоторые типы перейдут на uint64_t. А можете оптимизировать: до uint32_t, как написали напр. есть ненужный байт).
- Код:
uint8_t shiftIn(uint8_t dataPin, uint8_t clockPin, uint8_t bitOrder) {
uint8_t value = 0;
uint8_t i;
for (i = 0; i < 8; ++i) {
digitalWrite(clockPin, HIGH);
if (bitOrder == LSBFIRST)
value |= digitalRead(dataPin) << i;
else
value |= digitalRead(dataPin) << (7 - i);
digitalWrite(clockPin, LOW);
}
return value;
}
Последний раз редактировалось veso74 Вт авг 02, 2022 21:20:44, всего редактировалось 1 раз.