Re: Технояхтинг с Ардуино
Пн фев 07, 2022 14:22:06
Привет!
Роман, спасибо за наводку на хабре. Буду следить за творчеством этого чела
Добавлено after 3 hours 25 minutes 52 seconds:
Запилил тестовый макет с возможностью переключить шину i2c магнитометра через MPU-6500
Есть желание пощупать DMP. Первый раз об этом слышу

Примерная компоновка в коробочке КМ41212-01 (в Бауцентре покупал) примерно такая

Роман, спасибо за наводку на хабре. Буду следить за творчеством этого чела
Добавлено after 3 hours 25 minutes 52 seconds:
Запилил тестовый макет с возможностью переключить шину i2c магнитометра через MPU-6500
Есть желание пощупать DMP. Первый раз об этом слышу

Примерная компоновка в коробочке КМ41212-01 (в Бауцентре покупал) примерно такая

Re: Технояхтинг с Ардуино
Пн фев 07, 2022 19:56:37
зачем i2c... есть же нормальный быстрый SPI...
https://aliexpress.ru/item/100500309378 ... 76b52Yrnaz
...
https://aliexpress.ru/item/100500309378 ... 76b52Yrnaz
...
Re: Технояхтинг с Ардуино
Пн фев 07, 2022 20:19:46
Долго ждать посылки... А так, что в закромах нашел тем и пользуюсь
Использовать платы с SPI смысла не вижу. Время для оцифровки данных акселерометра и гироскопа до 10ms,
а если задействовать DMP будет еще больше. Аппаратное прерывание не используется. Забор данных по таймеру сделаю.
И для автопилота дискретность получения этих данных в 0.5-1 сек будет выше крыши. Лодки под парусами быстро не ходят.
7-10 узлов это уже хорошо. Так что быстрые интерфейсы ни к чему
Использовать платы с SPI смысла не вижу. Время для оцифровки данных акселерометра и гироскопа до 10ms,
а если задействовать DMP будет еще больше. Аппаратное прерывание не используется. Забор данных по таймеру сделаю.
И для автопилота дискретность получения этих данных в 0.5-1 сек будет выше крыши. Лодки под парусами быстро не ходят.
7-10 узлов это уже хорошо. Так что быстрые интерфейсы ни к чему
Re: Технояхтинг с Ардуино
Вт фев 08, 2022 16:05:50
maxlab писал(а):Использовать платы с SPI смысла не вижу.
вопрос не в скорости... вопрос в унификации и стандартизации...
к примеру в нашем кораблике все модули подключены к центральному процессору по общей шине SPI
аналогично работает и ПК
у нас не просто игрушечный кораблик)) у нас платформа для отработки новых технологий...
Правда не все это поняли... ну и ладно))

Re: Технояхтинг с Ардуино
Вт фев 08, 2022 16:21:09
Я не возражаю
Здесь не много другая концепция...
Центральный процессор, он же мастер устройство, общается с различными модулями, датчиками и исполнительными
устройствами посредством ModBus. Все эти девайсы устанавливаются в разных местах, вплоть до топа мачты. Это не в одной коробке. А конкретная реализация конечных устройств истекает из элементной базы что под рукой. Как то так
Здесь не много другая концепция...
Центральный процессор, он же мастер устройство, общается с различными модулями, датчиками и исполнительными
устройствами посредством ModBus. Все эти девайсы устанавливаются в разных местах, вплоть до топа мачты. Это не в одной коробке. А конкретная реализация конечных устройств истекает из элементной базы что под рукой. Как то так
Re: Технояхтинг с Ардуино
Ср фев 09, 2022 15:36:38
Остался последний вопрос - за что отвечает Центральный процессор, он же мастер устройство ?
главный вопрос - распределение задач (точнее распределение вычислительных ресурсов).
вопрос - а потянет ли один Центральный процессор, он же мастер устройство ?
к примеру мы подключали к одному центральному процессору экранчики всякие...
4 экранчика OLED и/или LCD один процессор тянет спокойно...
а вот экранчик TFT один процессор уже не тянет... точнее тянет но с низким fps...
Пришлось ставить отдельный процессор - видеокарту ))
потом решили сделать автопилот... но оказалось что один процессор не тянет и управление всеми устройствами и автопилот... пришлось ставить отдельный процессор на автопилот... ESP32
поэтому надо всё хорошо продумать чтоб больше не повторять ошибок.
а потом концепция изменилась))
и вместо отдельного процессора решили сделать всё управление на гаджете...
в любом современном гаджете стоит мощный процессор с огромным запасом вычислительных ресурсов))
главный вопрос - распределение задач (точнее распределение вычислительных ресурсов).
вопрос - а потянет ли один Центральный процессор, он же мастер устройство ?
к примеру мы подключали к одному центральному процессору экранчики всякие...
4 экранчика OLED и/или LCD один процессор тянет спокойно...
а вот экранчик TFT один процессор уже не тянет... точнее тянет но с низким fps...
Пришлось ставить отдельный процессор - видеокарту ))
потом решили сделать автопилот... но оказалось что один процессор не тянет и управление всеми устройствами и автопилот... пришлось ставить отдельный процессор на автопилот... ESP32
поэтому надо всё хорошо продумать чтоб больше не повторять ошибок.
а потом концепция изменилась))
и вместо отдельного процессора решили сделать всё управление на гаджете...
в любом современном гаджете стоит мощный процессор с огромным запасом вычислительных ресурсов))
Re: Технояхтинг с Ардуино
Ср фев 09, 2022 16:54:04
Ну так... я же выше писал что в качестве мастера нетбук (или промышленный/милитари ноут) буду использовать
Зачем велосипед изобретать.
А отвечает он за все...
Центральное ПО - OpenCPN
Вспомогательное ПО - Processing (он же Java)
Ну и самописные плагины... Автопилот заюзаю pyPilot. Там только с сопряжением повозиться надо
Смартфоны сейчас конечно продвинутые, но я им не доверяю
И еще, как вариант, малинка 4 с 8Гб на борту или Rock PI
Зачем велосипед изобретать.
А отвечает он за все...
Центральное ПО - OpenCPN
Вспомогательное ПО - Processing (он же Java)
Ну и самописные плагины... Автопилот заюзаю pyPilot. Там только с сопряжением повозиться надо
Смартфоны сейчас конечно продвинутые, но я им не доверяю
И еще, как вариант, малинка 4 с 8Гб на борту или Rock PI
Последний раз редактировалось maxlab Ср фев 09, 2022 17:08:49, всего редактировалось 1 раз.
Re: Технояхтинг с Ардуино
Ср фев 09, 2022 17:07:39
Re: Технояхтинг с Ардуино
Ср фев 09, 2022 17:53:36
ну замечательно)) осталось нарисовать схему))
ну можно и так.
у нас тоже была такая мысль))
только ноут имеет свойство иногда зависать)) это надо учитывать...
мы это решили очень просто - в случае если пульт (или ПК) не отвечает то в кораблике через секунду срабатывает таймер и кораблик останавливает - выключается двигатель, руль в переводится в среднее положение и кораблик сообщает нам о потери связи с пультом (или ПК) ярким миганием фонарей со звуковой сигнализацией))
надо ещё сделать удалённую перезагрузку ПК...
а в идеале надо сделать горячее резервирование - в случае отказа одного ПК всё управление переходит к резервному ПК...

ну можно и так.
у нас тоже была такая мысль))
только ноут имеет свойство иногда зависать)) это надо учитывать...
мы это решили очень просто - в случае если пульт (или ПК) не отвечает то в кораблике через секунду срабатывает таймер и кораблик останавливает - выключается двигатель, руль в переводится в среднее положение и кораблик сообщает нам о потери связи с пультом (или ПК) ярким миганием фонарей со звуковой сигнализацией))
надо ещё сделать удалённую перезагрузку ПК...
а в идеале надо сделать горячее резервирование - в случае отказа одного ПК всё управление переходит к резервному ПК...
Re: Технояхтинг с Ардуино
Ср фев 09, 2022 18:19:41
Нет на яхте автопилотов, что вы как сухопутные крысы - авторулевой!
схема - офигенная. аж жуть.
схема - офигенная. аж жуть.
Re: Технояхтинг с Ардуино
Ср фев 09, 2022 22:45:22
Резервирование будет. Главный резерв это команда и традиционные способы навигации. Ну, или я... если в одно рыло ходить
Роман, а что за плата эхолота в Вашем проекте?
Роман, а что за плата эхолота в Вашем проекте?
Re: Технояхтинг с Ардуино
Чт фев 10, 2022 12:03:42
у нас кораблик разрабатывался для рыбалки...
эхолот простой... типа такого - https://aliexpress.ru/item/32672648100. ... 672a8c5fNw
эхолот простой... типа такого - https://aliexpress.ru/item/32672648100. ... 672a8c5fNw
Re: Технояхтинг с Ардуино
Чт фев 10, 2022 12:45:54
в случае отказа одного ПК всё управление переходит к резервному ПК...
что то сразу вспомнилось "а на этот случай у меня проездной"
Re: Технояхтинг с Ардуино
Чт фев 10, 2022 15:28:21
roman.com писал(а):горячее резервирование - в случае отказа одного ПК всё управление переходит к резервному ПК...
это стандартная система любого современного автопилота...
в самолёте 5 штук компьютеров дублирующих друг друга...
Добавлено after 2 minutes 18 seconds:
а вместо ModBus мы разработали свой собственный протокол на AVR ))
Re: Технояхтинг с Ардуино
Сб фев 12, 2022 23:11:22
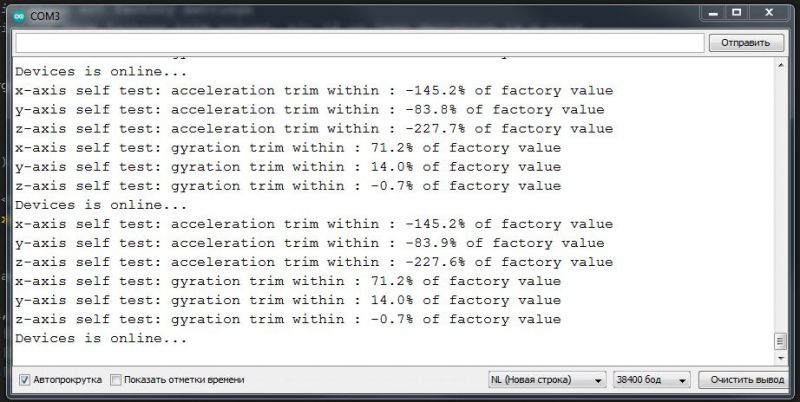
Привет всем! В общем с IMU-6500 (аксель-гироскоп) какие то непонятки.

Вроде пишут что отклонение между текущим замером в неподвижном состоянии и фабричным не должно превышать 14% по всем измерениям.
А у меня какая то фигня. Хотя, уже 3 часа наблюдаю за процедурой самотестирования, дает одни и те же результаты.
Апнота по selftest в сети не нашел. Может я что то делаю не так? Или забить на это??? Все равно в ручную калибровать буду
Добавлено after 5 minutes 8 seconds:
Процедура само-тестирования у практически всех поставщиков библиотек на ГитХабе примерно одинаковая
и выглядит так
Вроде пишут что отклонение между текущим замером в неподвижном состоянии и фабричным не должно превышать 14% по всем измерениям.
А у меня какая то фигня. Хотя, уже 3 часа наблюдаю за процедурой самотестирования, дает одни и те же результаты.
Апнота по selftest в сети не нашел. Может я что то делаю не так? Или забить на это??? Все равно в ручную калибровать буду
Добавлено after 5 minutes 8 seconds:
Процедура само-тестирования у практически всех поставщиков библиотек на ГитХабе примерно одинаковая
и выглядит так
Спойлер
- Код:
// Accelerometer and gyroscope self test; check calibration wrt factory settings
bool self_test_impl() // Should return percent deviation from factory trim values, +/- 14 or less deviation is a pass
{
uint8_t raw_data[6] = {0, 0, 0, 0, 0, 0};
int32_t gAvg[3] = {0}, aAvg[3] = {0}, aSTAvg[3] = {0}, gSTAvg[3] = {0};
float factoryTrim[6];
uint8_t FS = 0;
writeByte(MPU6500_ADDRESS, SMPLRT_DIV, 0x00); // Set gyro sample rate to 1 kHz
writeByte(MPU6500_ADDRESS, CONFIG, 0x02); // Set gyro sample rate to 1 kHz and DLPF to 92 Hz
writeByte(MPU6500_ADDRESS, GYRO_CONFIG, FS << 3); // Set full scale range for the gyro to 250 dps
writeByte(MPU6500_ADDRESS, ACCEL_CONFIG2, 0x02); // Set accelerometer rate to 1 kHz and bandwidth to 92 Hz
writeByte(MPU6500_ADDRESS, ACCEL_CONFIG, FS << 3); // Set full scale range for the accelerometer to 2 g
for (int ii = 0; ii < 200; ii++) { // get average current values of gyro and acclerometer
readBytes(MPU6500_ADDRESS, ACCEL_XOUT_H, 6, &raw_data[0]); // Read the six raw data registers into data array
aAvg[0] += (int16_t)(((int16_t)raw_data[0] << 8) | raw_data[1]); // Turn the MSB and LSB into a signed 16-bit value
aAvg[1] += (int16_t)(((int16_t)raw_data[2] << 8) | raw_data[3]);
aAvg[2] += (int16_t)(((int16_t)raw_data[4] << 8) | raw_data[5]);
readBytes(MPU6500_ADDRESS, GYRO_XOUT_H, 6, &raw_data[0]); // Read the six raw data registers sequentially into data array
gAvg[0] += (int16_t)(((int16_t)raw_data[0] << 8) | raw_data[1]); // Turn the MSB and LSB into a signed 16-bit value
gAvg[1] += (int16_t)(((int16_t)raw_data[2] << 8) | raw_data[3]);
gAvg[2] += (int16_t)(((int16_t)raw_data[4] << 8) | raw_data[5]);
}
for (int ii = 0; ii < 3; ii++) { // Get average of 200 values and store as average current readings
aAvg[ii] /= 200;
gAvg[ii] /= 200;
}
// Configure the accelerometer for self-test
writeByte(MPU6500_ADDRESS, ACCEL_CONFIG, 0xE0); // Enable self test on all three axes and set accelerometer range to +/- 2 g
writeByte(MPU6500_ADDRESS, GYRO_CONFIG, 0xE0); // Enable self test on all three axes and set gyro range to +/- 250 degrees/s
delay(25); // Delay a while to let the device stabilize
for (int ii = 0; ii < 200; ii++) { // get average self-test values of gyro and acclerometer
readBytes(MPU6500_ADDRESS, ACCEL_XOUT_H, 6, &raw_data[0]); // Read the six raw data registers into data array
aSTAvg[0] += (int16_t)(((int16_t)raw_data[0] << 8) | raw_data[1]); // Turn the MSB and LSB into a signed 16-bit value
aSTAvg[1] += (int16_t)(((int16_t)raw_data[2] << 8) | raw_data[3]);
aSTAvg[2] += (int16_t)(((int16_t)raw_data[4] << 8) | raw_data[5]);
readBytes(MPU6500_ADDRESS, GYRO_XOUT_H, 6, &raw_data[0]); // Read the six raw data registers sequentially into data array
gSTAvg[0] += (int16_t)(((int16_t)raw_data[0] << 8) | raw_data[1]); // Turn the MSB and LSB into a signed 16-bit value
gSTAvg[1] += (int16_t)(((int16_t)raw_data[2] << 8) | raw_data[3]);
gSTAvg[2] += (int16_t)(((int16_t)raw_data[4] << 8) | raw_data[5]);
}
for (int ii = 0; ii < 3; ii++) { // Get average of 200 values and store as average self-test readings
aSTAvg[ii] /= 200;
gSTAvg[ii] /= 200;
}
// Configure the gyro and accelerometer for normal operation
writeByte(MPU6500_ADDRESS, ACCEL_CONFIG, 0x00);
writeByte(MPU6500_ADDRESS, GYRO_CONFIG, 0x00);
delay(25); // Delay a while to let the device stabilize
// Retrieve accelerometer and gyro factory Self-Test Code from USR_Reg
uint8_t self_test_data[6];
self_test_data[0] = readByte(MPU6500_ADDRESS, SELF_TEST_X_ACCEL); // X-axis accel self-test results
self_test_data[1] = readByte(MPU6500_ADDRESS, SELF_TEST_Y_ACCEL); // Y-axis accel self-test results
self_test_data[2] = readByte(MPU6500_ADDRESS, SELF_TEST_Z_ACCEL); // Z-axis accel self-test results
self_test_data[3] = readByte(MPU6500_ADDRESS, SELF_TEST_X_GYRO); // X-axis gyro self-test results
self_test_data[4] = readByte(MPU6500_ADDRESS, SELF_TEST_Y_GYRO); // Y-axis gyro self-test results
self_test_data[5] = readByte(MPU6500_ADDRESS, SELF_TEST_Z_GYRO); // Z-axis gyro self-test results
// Retrieve factory self-test value from self-test code reads
factoryTrim[0] = (float)(2620 / 1 << FS) * (pow(1.01, ((float)self_test_data[0] - 1.0))); // FT[Xa] factory trim calculation
factoryTrim[1] = (float)(2620 / 1 << FS) * (pow(1.01, ((float)self_test_data[1] - 1.0))); // FT[Ya] factory trim calculation
factoryTrim[2] = (float)(2620 / 1 << FS) * (pow(1.01, ((float)self_test_data[2] - 1.0))); // FT[Za] factory trim calculation
factoryTrim[3] = (float)(2620 / 1 << FS) * (pow(1.01, ((float)self_test_data[3] - 1.0))); // FT[Xg] factory trim calculation
factoryTrim[4] = (float)(2620 / 1 << FS) * (pow(1.01, ((float)self_test_data[4] - 1.0))); // FT[Yg] factory trim calculation
factoryTrim[5] = (float)(2620 / 1 << FS) * (pow(1.01, ((float)self_test_data[5] - 1.0))); // FT[Zg] factory trim calculation
// Report results as a ratio of (STR - FT)/FT; the change from Factory Trim of the Self-Test Response
// To get percent, must multiply by 100
for (int i = 0; i < 3; i++) {
self_test_result[i] = 100.0 * ((float)(aSTAvg[i] - aAvg[i])) / factoryTrim[i] - 100.; // Report percent differences
self_test_result[i + 3] = 100.0 * ((float)(gSTAvg[i] - gAvg[i])) / factoryTrim[i + 3] - 100.; // Report percent differences
}
// Serial.print("x-axis self test: acceleration trim within : ");
// Serial.print(self_test_result[0], 1);
// Serial.println("% of factory value");
// Serial.print("y-axis self test: acceleration trim within : ");
// Serial.print(self_test_result[1], 1);
// Serial.println("% of factory value");
// Serial.print("z-axis self test: acceleration trim within : ");
// Serial.print(self_test_result[2], 1);
// Serial.println("% of factory value");
// Serial.print("x-axis self test: gyration trim within : ");
// Serial.print(self_test_result[3], 1);
// Serial.println("% of factory value");
// Serial.print("y-axis self test: gyration trim within : ");
// Serial.print(self_test_result[4], 1);
// Serial.println("% of factory value");
// Serial.print("z-axis self test: gyration trim within : ");
// Serial.print(self_test_result[5], 1);
// Serial.println("% of factory value");
bool b = true;
for (uint8_t i = 0; i < 6; ++i) {
b &= fabs(self_test_result[i]) <= 14.f;
}
return b;
}
Re: Технояхтинг с Ардуино
Вс фев 13, 2022 14:26:51
а как мы комп подключать будем ?
через COM что ли ? ))
через COM что ли ? ))
Re: Технояхтинг с Ардуино
Вс фев 13, 2022 15:45:55
Вариантов масса. Я использую такой конвертер
https://aliexpress.ru/item/400129246584 ... 5642843938
Нормально работает даже в цеховых условиях вблизи оборудования с повышенным уровнем помех.
Есть промышленные преобразователи RS485 во что угодно
Для лодки можно использовать дешевый эквивалент
https://aliexpress.ru/item/100500356162 ... 3d62Ub98h4
https://aliexpress.ru/item/400129246584 ... 5642843938
Нормально работает даже в цеховых условиях вблизи оборудования с повышенным уровнем помех.
Есть промышленные преобразователи RS485 во что угодно
Для лодки можно использовать дешевый эквивалент
https://aliexpress.ru/item/100500356162 ... 3d62Ub98h4
Re: Технояхтинг с Ардуино
Вс фев 13, 2022 16:31:51
а я думал что будет яхта с автопилотом и IP камерой... управление с ПК и телефона по Wi-Fi и Ethernet...
RS... устарело немного...

RS... устарело немного...
Re: Технояхтинг с Ардуино
Вс фев 13, 2022 16:44:54
Это вишенка на торте Когда основная инфраструктура будет готова, тогда можно будет подумать о дистанционном
управлении. Кроме того, эту инфраструктуру нужно будет обкатать в реальных условиях. Т.е. этот проект у меня как минимум
на год-полтора. А там видно будет...
Практическое применение этому на лодках есть. Например, стоит твоя красавица на муринге посреди бухты... А ты на берегу.
Вот, сбросить конец и подойти к удобному месту посадки людей используя пульт ДУ.
Правда, обратная процедура затруднительна... Это еще на лодку надо манипулятор типа Kuka прикрутить чтобы веревку от
муринга из воды подобрать и зафиксировать в стопоре
В качестве развлекухи https://www.youtube.com/watch?v=bAdqazixuRY
управлении. Кроме того, эту инфраструктуру нужно будет обкатать в реальных условиях. Т.е. этот проект у меня как минимум
на год-полтора. А там видно будет...
Практическое применение этому на лодках есть. Например, стоит твоя красавица на муринге посреди бухты... А ты на берегу.
Вот, сбросить конец и подойти к удобному месту посадки людей используя пульт ДУ.
Правда, обратная процедура затруднительна... Это еще на лодку надо манипулятор типа Kuka прикрутить чтобы веревку от
муринга из воды подобрать и зафиксировать в стопоре
В качестве развлекухи https://www.youtube.com/watch?v=bAdqazixuRY
Re: Технояхтинг с Ардуино
Вс фев 13, 2022 17:11:18

до берега Wi-Fi не добьёт...
Надо GSM или LTE или простой радио модем...